
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
When Grid/RayTracing is enabled, the free space will tracked in the OctoMap.
Example with robot mapping demo:
$ roslaunch rtabmap_ros demo_robot_mapping.launch rviz:=true
In rtabmapviz, open Preferences->Local Occupancy Grid, then check "From Depth" (Grid/FromDepth) and "Ray Tracing" (Grid/RayTracing). Start the demo bag:
rosbag play --clock demo_mapping.bag
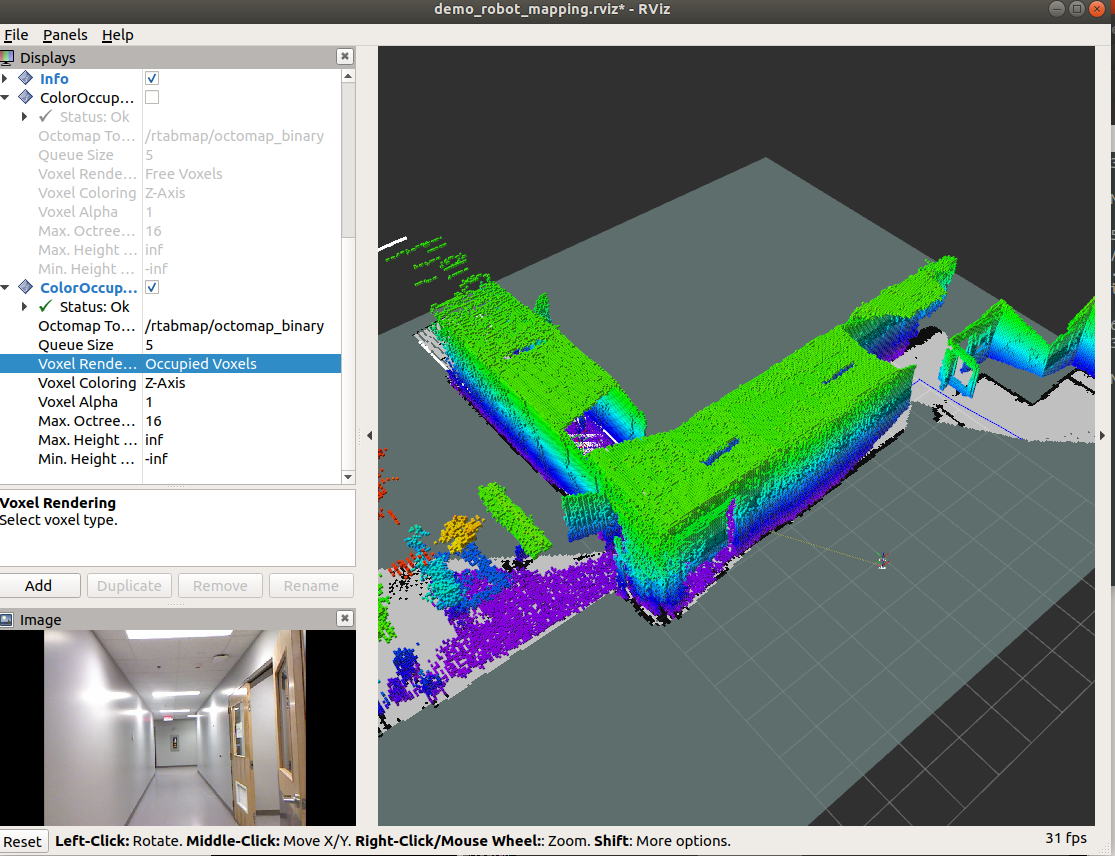
Obstacles:
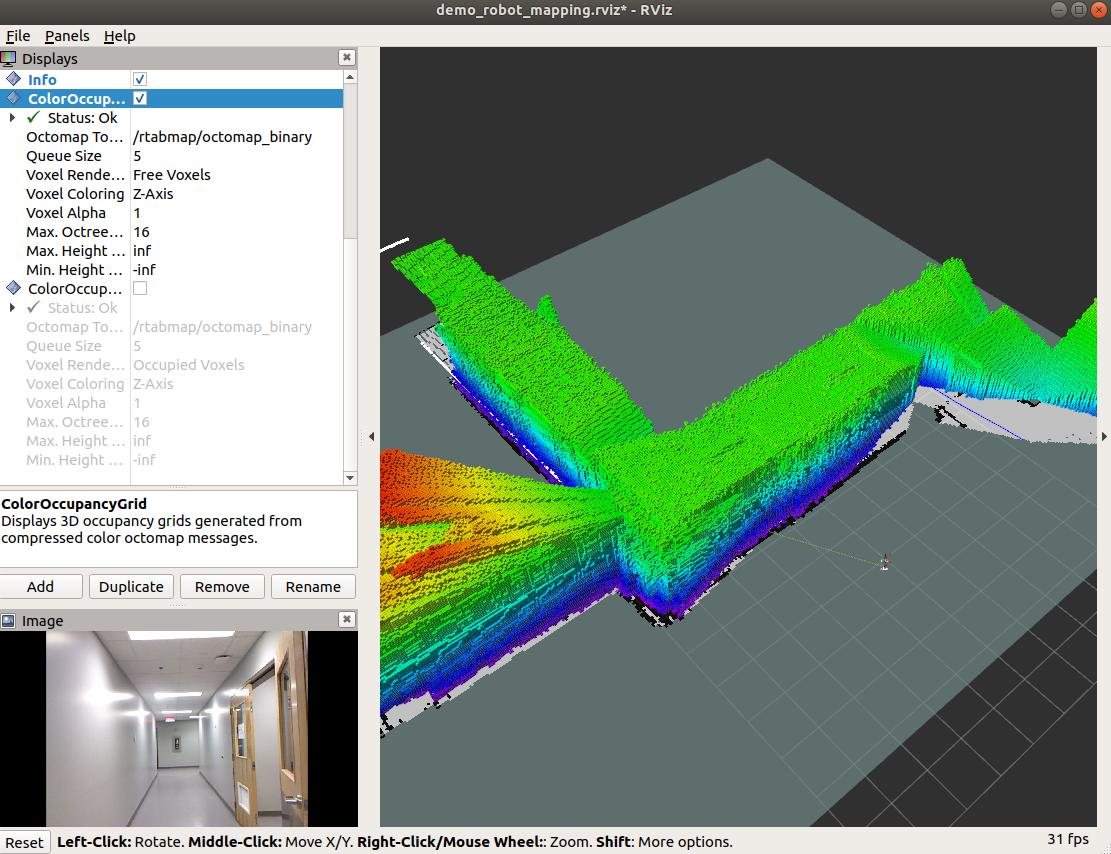
Empty space:
cheers,
Mathieu
| | 2 | No.2 Revision |
When Grid/RayTracing is enabled, the free space will be tracked in the OctoMap.
Example with robot mapping demo:
$ roslaunch rtabmap_ros demo_robot_mapping.launch rviz:=true
In rtabmapviz, open Preferences->Local Occupancy Grid, then check "From Depth" (Grid/FromDepth) and "Ray Tracing" (Grid/RayTracing). Start the demo bag:
rosbag play --clock demo_mapping.bag
Obstacles:
Empty space:
cheers,
Mathieu
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
