
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
I found a solution by myself, and hope it could help you guys !
1.Follow this tutorials to install libfreenect if you use kinect v2 2.Run the test openni step in the last line
sudo apt-get install openni2-utils && sudo make install-openni2 && NiViewer2
If you install successfully, it will show you a depth image and raw image in a window
3.Run the openni2 launch
roslaunch openni2_launch openni2.launch
You will see these error message and just ignore them.
[ERROR] [1552467844.769017052]: Unsupported IR video mode - Resolution: 640x480@30Hz Format: Gray16
[ERROR] [1552467844.769132239]: Unsupported color video mode - Resolution: 640x480@30Hz Format: RGB888
[ERROR] [1552467844.769336219]: Could not set auto exposure. Reason: void openni2_wrapper::OpenNI2Device::setAutoExposure(bool) @ /home/cyc/catkin_ws/src/openni2_camera/openni2_camera/src/openni2_device.cpp @ 549 : Couldn't set auto exposure:
Stream setProperty(101) failed
[ERROR] [1552467844.769386920]: Could not set auto white balance. Reason: void openni2_wrapper::OpenNI2Device::setAutoWhiteBalance(bool) @ /home/cyc/catkin_ws/src/openni2_camera/openni2_camera/src/openni2_device.cpp @ 565 : Couldn't set auto white balance:
Stream setProperty(100) failed
[ERROR] [1552467844.769438262]: Could not set exposure. Reason: void openni2_wrapper::OpenNI2Device::setExposure(int) @ /home/cyc/catkin_ws/src/openni2_camera/openni2_camera/src/openni2_device.cpp @ 582 : Couldn't set exposure:
Stream setProperty(102) failed
This mean kinect v2 with openni do not support those function,but it didn't influence my project. If anyone know how to fix it, please add it.
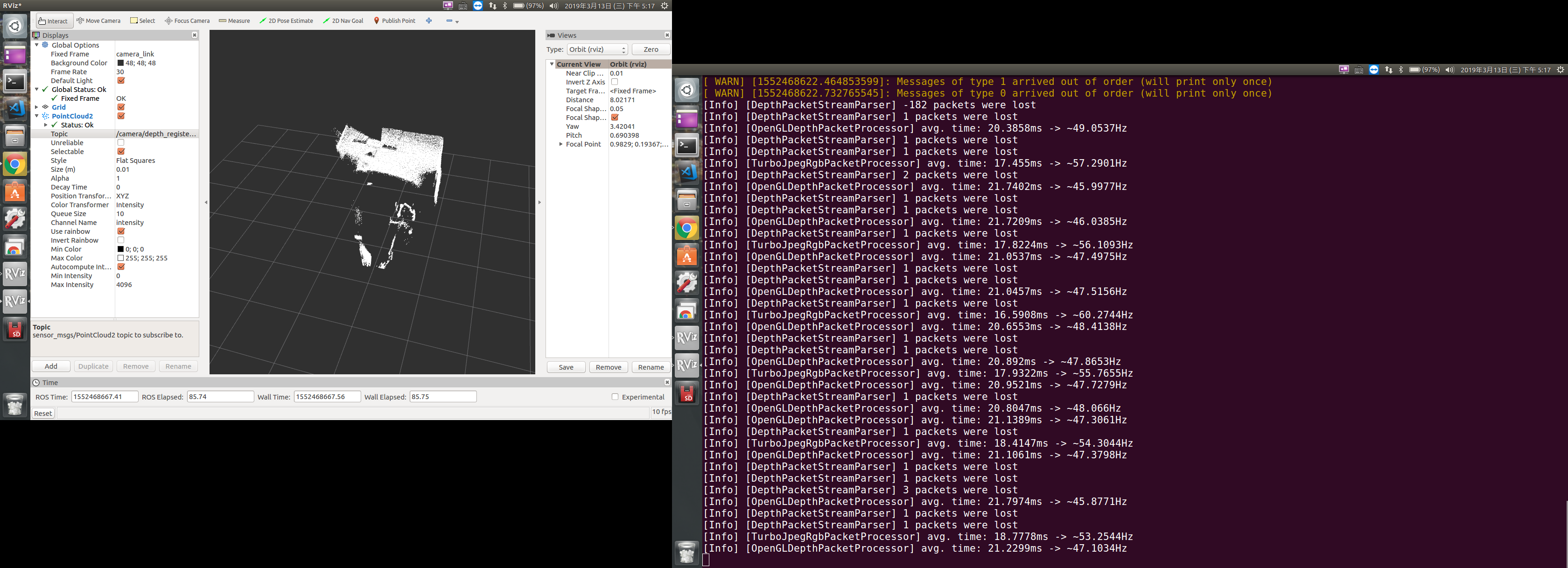
4.View in Rviz
| | 2 | No.2 Revision |
I found a solution by myself, and hope it could help you guys !
1.Follow this tutorials to install libfreenect if you use kinect v2
v2.
2.Run the test openni step in the last line line.
sudo apt-get install openni2-utils && sudo make install-openni2 && NiViewer2
If you install successfully, it will show you a depth image and raw image in a windowwindow.
3.Run the openni2 launch
roslaunch openni2_launch openni2.launch
You will see these error message and just ignore them.
[ERROR] [1552467844.769017052]: Unsupported IR video mode - Resolution: 640x480@30Hz Format: Gray16
[ERROR] [1552467844.769132239]: Unsupported color video mode - Resolution: 640x480@30Hz Format: RGB888
[ERROR] [1552467844.769336219]: Could not set auto exposure. Reason: void openni2_wrapper::OpenNI2Device::setAutoExposure(bool) @ /home/cyc/catkin_ws/src/openni2_camera/openni2_camera/src/openni2_device.cpp @ 549 : Couldn't set auto exposure:
Stream setProperty(101) failed
[ERROR] [1552467844.769386920]: Could not set auto white balance. Reason: void openni2_wrapper::OpenNI2Device::setAutoWhiteBalance(bool) @ /home/cyc/catkin_ws/src/openni2_camera/openni2_camera/src/openni2_device.cpp @ 565 : Couldn't set auto white balance:
Stream setProperty(100) failed
[ERROR] [1552467844.769438262]: Could not set exposure. Reason: void openni2_wrapper::OpenNI2Device::setExposure(int) @ /home/cyc/catkin_ws/src/openni2_camera/openni2_camera/src/openni2_device.cpp @ 582 : Couldn't set exposure:
Stream setProperty(102) failed
This mean kinect v2 with openni do not support those function,but it didn't influence my project. If anyone know how to fix it, please add it.
4.View in Rviz
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
