
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
I have a bagfile (5.8MB tar.bz2) that might work for you. On the base_laser1_scan topic you'll find the data from a SICK LMS291 outputting at 75Hz with 0.5 degree increments in a 180 degree FOV and 80 meters max range. The 0.5 degree increments actually means you get 2 separate 1 degree scans with slightly different angle_min and angle_max values to reflect the starting offset. If you just want 1 set of 1 degree scans, just pick a starting angle_min and filter all the scans with a different angle_min.
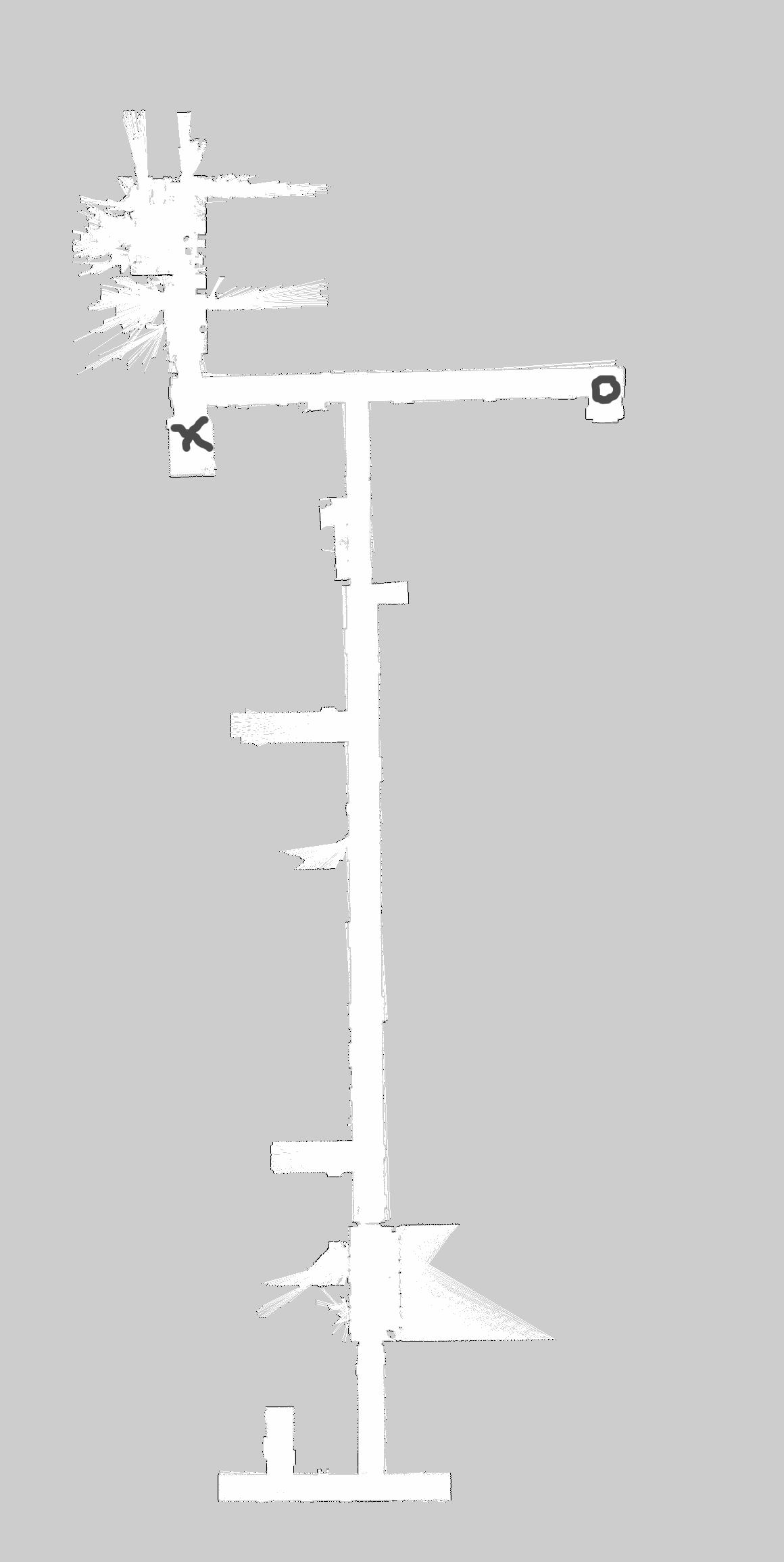
For a ground truth, these scans were taken while going from "X" to "O" and back on the map attached to this answer.
The bagfile I linked also contains uncorrected odometry information for the robot (CWRU's HARLIE) as it moved along, as well as laser scan topics from a Hokuyo URG-04LX (or URG-04LX-UG01 I can't remember exactly which) and the laser extracted from a Neato XV-11.
If that bagfile doesn't contain what you were looking for, I can check this evening to see if I still have the bagfile that we built the posted map from with gmapping. I believe that one was taken with the scanner set to 1 degree resolution as opposed to 0.5 degree resolution.
| | 2 | Added link to 1degree increment bagfile |
I have a bagfile (5.8MB tar.bz2) that might work for you. On the base_laser1_scan topic you'll find the data from a SICK LMS291 outputting at 75Hz with 0.5 degree increments in a 180 degree FOV and 80 meters max range. The 0.5 degree increments actually means you get 2 separate 1 degree scans with slightly different angle_min and angle_max values to reflect the starting offset. If you just want 1 set of 1 degree scans, just pick a starting angle_min and filter all the scans with a different angle_min.
For a ground truth, these scans were taken while going from "X" to "O" and back on the map attached to this answer.
The bagfile I linked also contains uncorrected odometry information for the robot (CWRU's HARLIE) as it moved along, as well as laser scan topics from a Hokuyo URG-04LX (or URG-04LX-UG01 I can't remember exactly which) and the laser extracted from a Neato XV-11.
If that bagfile doesn't contain what you were looking for, I can check this evening to see if I still have the bagfile that we built the posted map from with gmapping. I believe that one was taken with the scanner set to 1 degree resolution as opposed to 0.5 degree resolution.
UPDATE:
The bagfile that the map was built from (I'm ~90% certain) is here (44MB tar.bz2). I can't actually say for certain since my NVIDIA driver is currently in a weird state, so RViz isn't displaying laser data. The name and date are right for a data collection of that mapped area though.
The SICK was set to 1 degree mode, as there is only one angle_min value in the bagged data (/base_laser1_scan topic again). All other parameters were the same as above.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
