
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
OK, so a few points:
imu0_relative turned on for your EKF instance. That's going to make your orientations relative to the first IMU measurement.navsat_transform_node.| | 2 | No.2 Revision |
OK, so a few points:
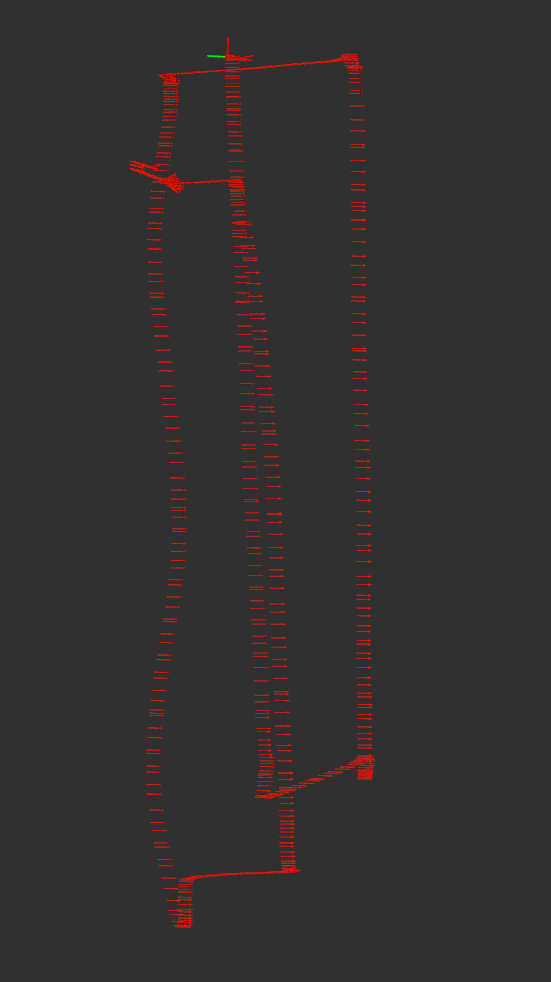
imu0_relative turned on for your EKF instance. That's going to make your orientations relative to the first IMU measurement.navsat_transform_node.EDIT 1: Here's a plot of your raw GPS data in Google Earth:

According to this data, you started in the top-left of the rectangle, then flew south, then east, then north, then west, then repeated the rectangle. The general shape maps decently to the fused IMU + velocity data (without GPS):
During the initial south traversal (the left side of the first rectangle), your drone's Y velocity was negative, implying that your vehicle was flying sideways, and in the direction of its right side:
header:
seq: 191
stamp:
secs: 1487237096
nsecs: 119077919
frame_id: bebop/base_link
twist:
twist:
linear:
x: 0.132194340229
y: -4.89818191528
z: -0.0242414772511
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [0.001, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.001, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.001, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
However, if your vehicle was flying sideways with negative Y velocity (i.e., right) and was also flying south, that means it must have been facing east. If it was facing east, and you corrected your IMU to be REP-105-compliant, the IMU should read approximately 0. However, during that same traversal (around the same time stamp of the above velocity message), I saved a sample IMU message:
header:
seq: 192
stamp:
secs: 1487237096
nsecs: 338866472
frame_id: bebop/base_link
orientation:
x: 0.0387072677682
y: 0.0236335869622
z: -0.685949077348
w: 0.726234854764
orientation_covariance: [1e-07, 0.0, 0.0, 0.0, 1e-07, 0.0, 0.0, 0.0, 1e-07]
angular_velocity:
x: 0.0
y: 0.0
z: 0.0
angular_velocity_covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
linear_acceleration:
x: 0.0
y: 0.0
z: 0.0
linear_acceleration_covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
That heading equates to -86.684 degrees, whereas it ought to be 0.
In other words, either your body-frame velocity is wrong, or your IMU is wrong (or maybe both, I'd have to see updated data).
If you fly again, it'll help if you make note of which way the drone was flying (i.e., flying forwards/sideways, and to which direction).
Oh, and just a heads-up: your GPS data appears to be pretty severely lagged. It follows the same shape as the drone's path, but is delayed significantly.
| | 3 | No.3 Revision |
OK, so a few points:
imu0_relative turned on for your EKF instance. That's going to make your orientations relative to the first IMU measurement.navsat_transform_node.EDIT 1: Here's a plot of your raw GPS data in Google Earth:
According to this data, you started in the top-left of the rectangle, then flew south, then east, then north, then west, then repeated the rectangle. The general shape maps decently to the fused IMU + velocity data (without GPS):
During the initial south traversal (the left side of the first rectangle), your drone's Y velocity was negative, implying that your vehicle was flying sideways, and in the direction of its right side:
header:
seq: 191
stamp:
secs: 1487237096
nsecs: 119077919
frame_id: bebop/base_link
twist:
twist:
linear:
x: 0.132194340229
y: -4.89818191528
z: -0.0242414772511
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [0.001, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.001, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.001, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
However, if your vehicle was flying sideways with negative Y velocity (i.e., right) and was also flying south, that means it must have been facing east. If it was facing east, and you corrected your IMU to be REP-105-compliant, REP-103-compliant, the IMU should read approximately 0. However, during that same traversal (around the same time stamp of the above velocity message), I saved a sample IMU message:
header:
seq: 192
stamp:
secs: 1487237096
nsecs: 338866472
frame_id: bebop/base_link
orientation:
x: 0.0387072677682
y: 0.0236335869622
z: -0.685949077348
w: 0.726234854764
orientation_covariance: [1e-07, 0.0, 0.0, 0.0, 1e-07, 0.0, 0.0, 0.0, 1e-07]
angular_velocity:
x: 0.0
y: 0.0
z: 0.0
angular_velocity_covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
linear_acceleration:
x: 0.0
y: 0.0
z: 0.0
linear_acceleration_covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
That heading equates to -86.684 degrees, whereas it ought to be 0.
In other words, either your body-frame velocity is wrong, or your IMU is wrong (or maybe both, I'd have to see updated data).
If you fly again, it'll help if you make note of which way the drone was flying (i.e., flying forwards/sideways, and to which direction).
Oh, and just a heads-up: your GPS data appears to be pretty severely lagged. It follows the same shape as the drone's path, but is delayed significantly.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
