
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
It's looking like the costmap_2d node is completely wrong for this task, unless I'm just missing a parameter or two that would get the desired behavior.
I think the solution will be a custom node that publishes an OccupancyGrid and subscribes to the footprint, and uses an opencv function to draw the footprint onto the grid when it updates and this will get the desired obstacle clearing behavior.
| | 2 | No.2 Revision |
It's looking like the costmap_2d node is completely wrong for this task, unless I'm just missing a parameter or two that would get the desired behavior.
I think the solution will be a custom node that publishes an OccupancyGrid and subscribes to the footprint, and uses an opencv function to draw the footprint onto the grid when it updates and this will get the desired obstacle clearing behavior.
update
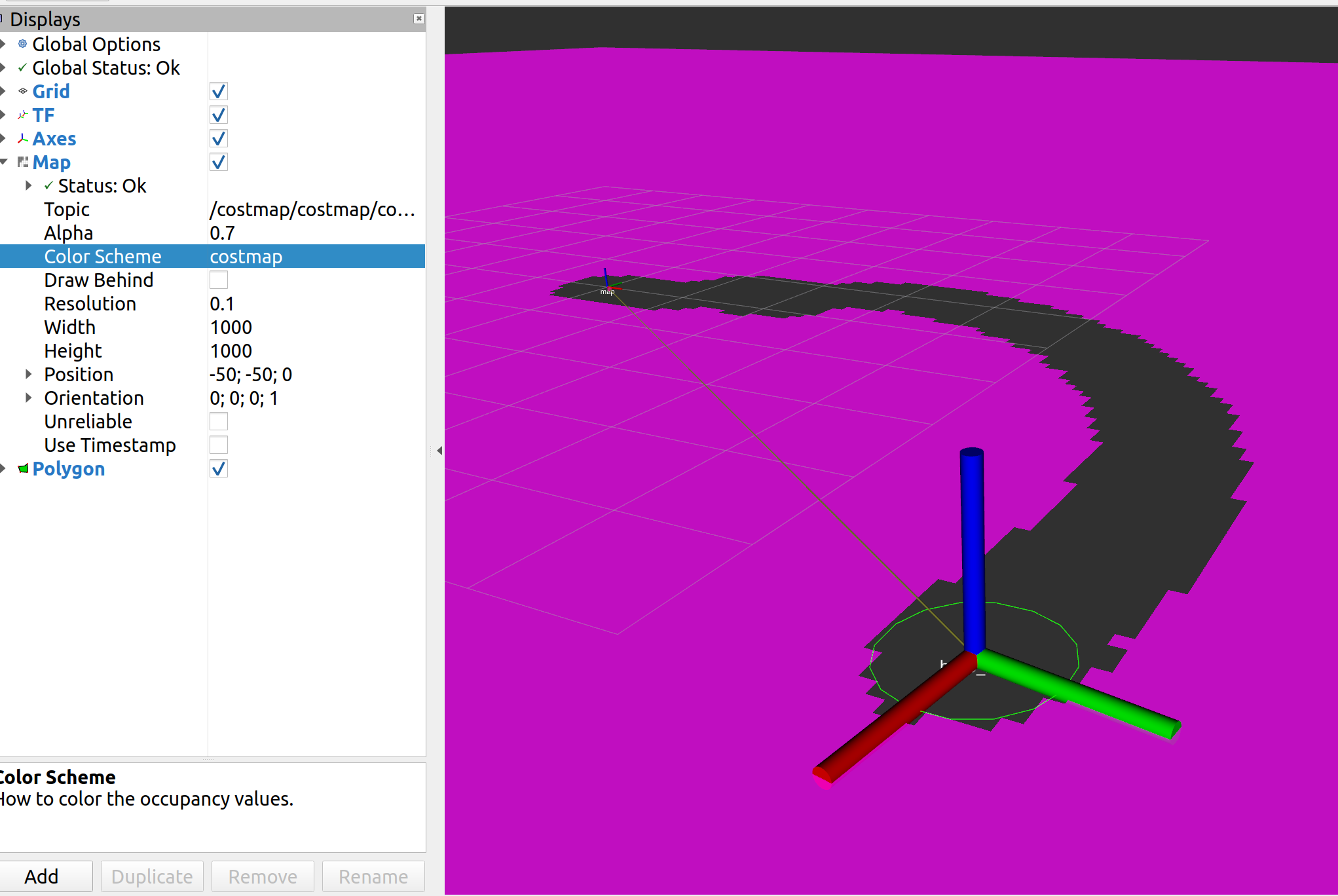
Just tried this again and I was able to take a pgm with all black pixels, a static map config with negate: 0, and combination_method: 0 :
``` plugins: - {name: static, type: "costmap_2d::StaticLayer"} - {name: cleared, type: "costmap_2d::ObstacleLayer"}
cleared: track_unknown_space: true combination_method: 0 ```
| | 3 | No.3 Revision |
It's looking like the costmap_2d node is completely wrong for this task, unless I'm just missing a parameter or two that would get the desired behavior.
I think the solution will be a custom node that publishes an OccupancyGrid and subscribes to the footprint, and uses an opencv function to draw the footprint onto the grid when it updates and this will get the desired obstacle clearing behavior.
update
Just tried this again and I was able to take a pgm with all black pixels, a static map config with negate: 0, and combination_method: 0 :
```
| | 4 | No.4 Revision |
It's looking like the costmap_2d node is completely wrong for this task, unless I'm just missing a parameter or two that would get the desired behavior.
I think the solution will be a custom node that publishes an OccupancyGrid and subscribes to the footprint, and uses an opencv function to draw the footprint onto the grid when it updates and this will get the desired obstacle clearing behavior.
update
Just tried this again and I was able to take a pgm with all black pixels, a static map config with negate: 0, and the obstacle layer has combination_method: 0 :
plugins:
- {name: static, type: "costmap_2d::StaticLayer"}
- {name: cleared, type: "costmap_2d::ObstacleLayer"}
cleared:
track_unknown_space: true
combination_method: 0
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
