
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
I opened hector_quadrotor_urdf/meshes/quadrotor/quadrotor_base.stl with meshlab and simply re-saving it seems to have fixed some issues.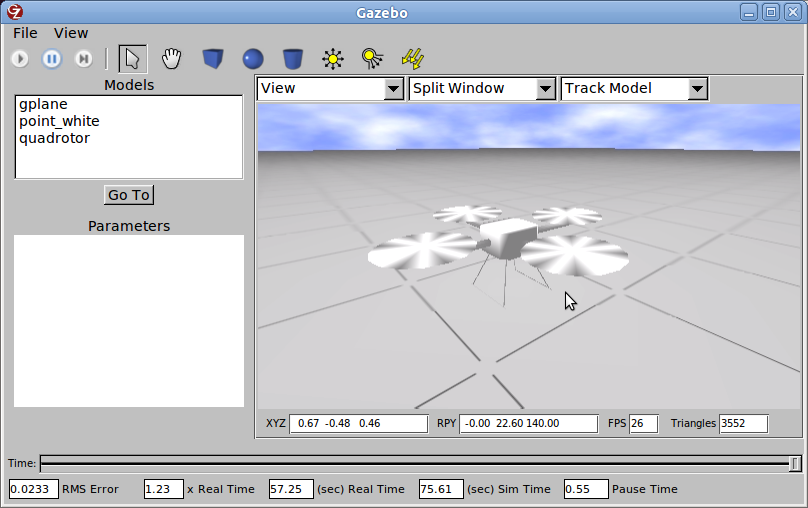
| | 2 | No.2 Revision |
I opened hector_quadrotor_urdf/meshes/quadrotor/quadrotor_base.stl with meshlab and simply re-saving it seems to have fixed some issues.
as for the dae file, I had to open it with meshlab and invert all normals for shading to appear. 
| | 3 | No.3 Revision |
| | 4 | No.4 Revision |
I opened hector_quadrotor_urdf/meshes/quadrotor/quadrotor_base.stl with meshlab and simply re-saving it seems to have fixed some issues.
as for the dae file, I had to open it with meshlab and invert all normals for shading to appear.
Here are the links to the modified meshes: stl dae
For dae, add scale tag to scale correctly:
<mesh filename="package://hector_quadrotor_urdf/meshes/quadrotor/quadrotor_base.dae" scale="0.01 0.01 0.01"/>
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.