
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
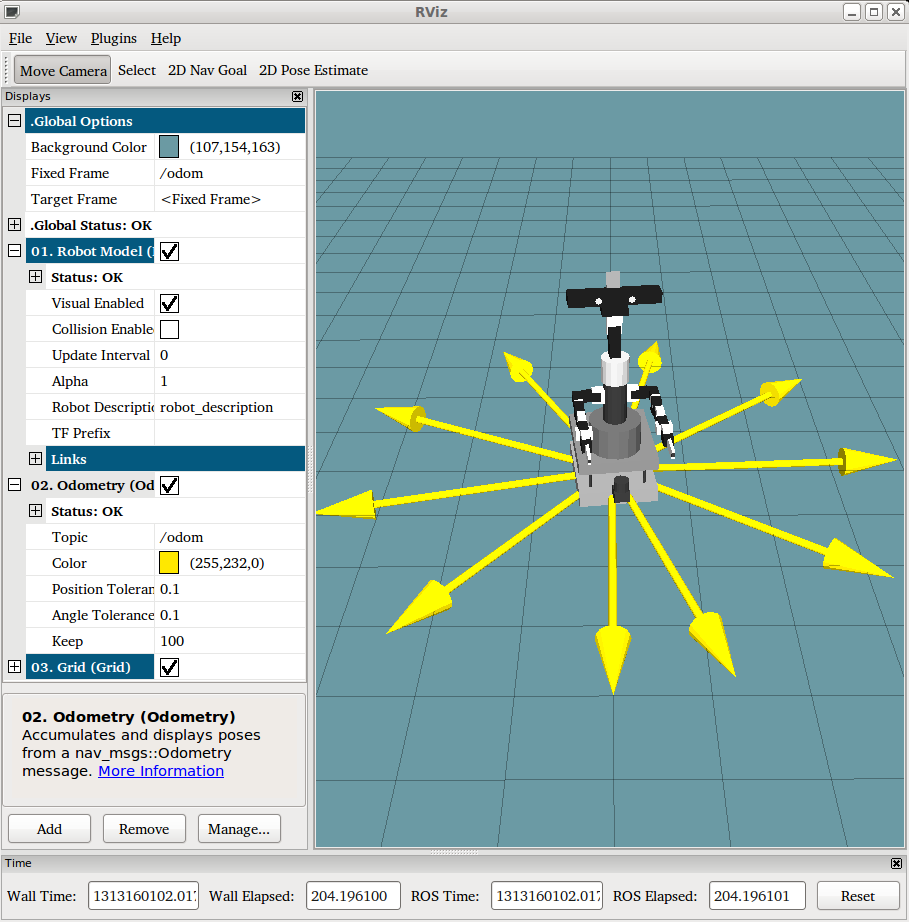
Try setting your fixed frame to /odom or /map (if you have a map). In my setup, you won't see any movement of the arrow when the fixed frame is set to /base_link. I've attached a snapshot from RViz after rotating the robot through 360 degrees. Note that this is using the latest Diamondback debian packages. The latest Electric seems to have a bug wherein the arrow points straight down instead of horizontally.
--patrick
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
{kind=link}