
RVIZ not displaying /scan frames
Hi,
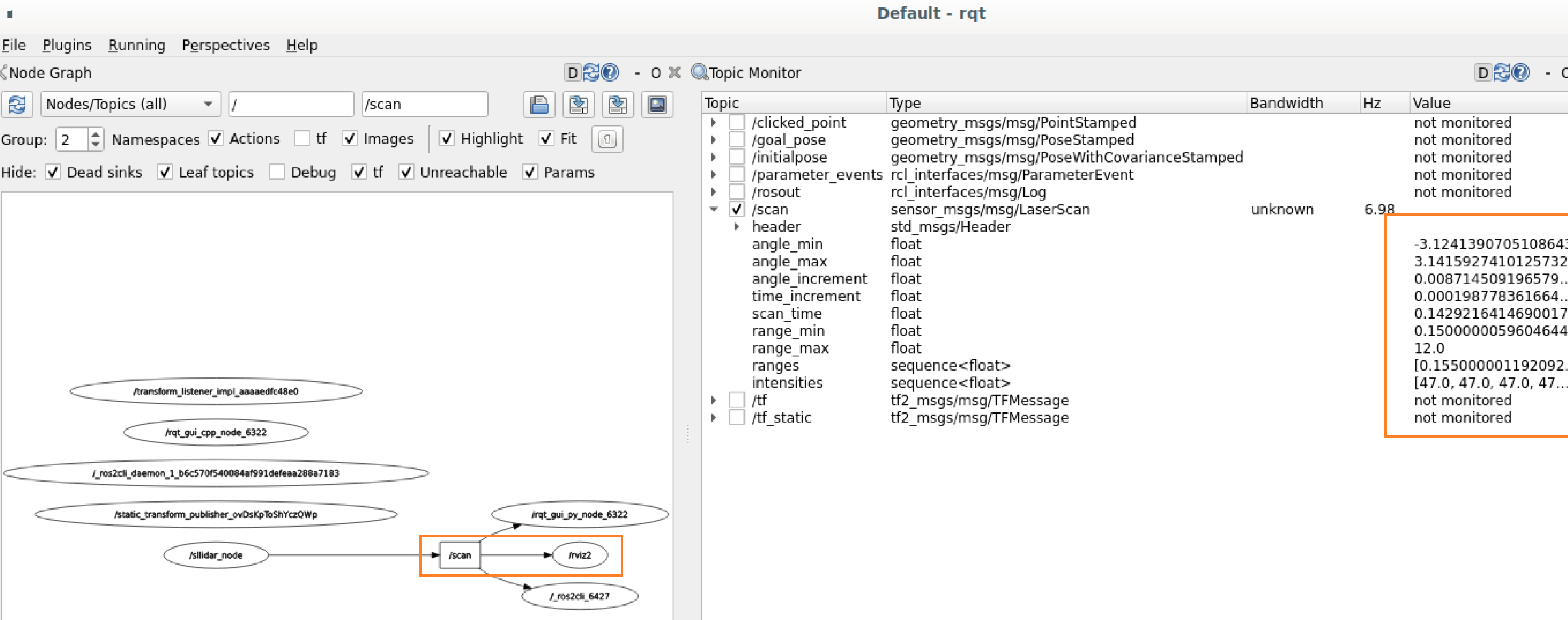
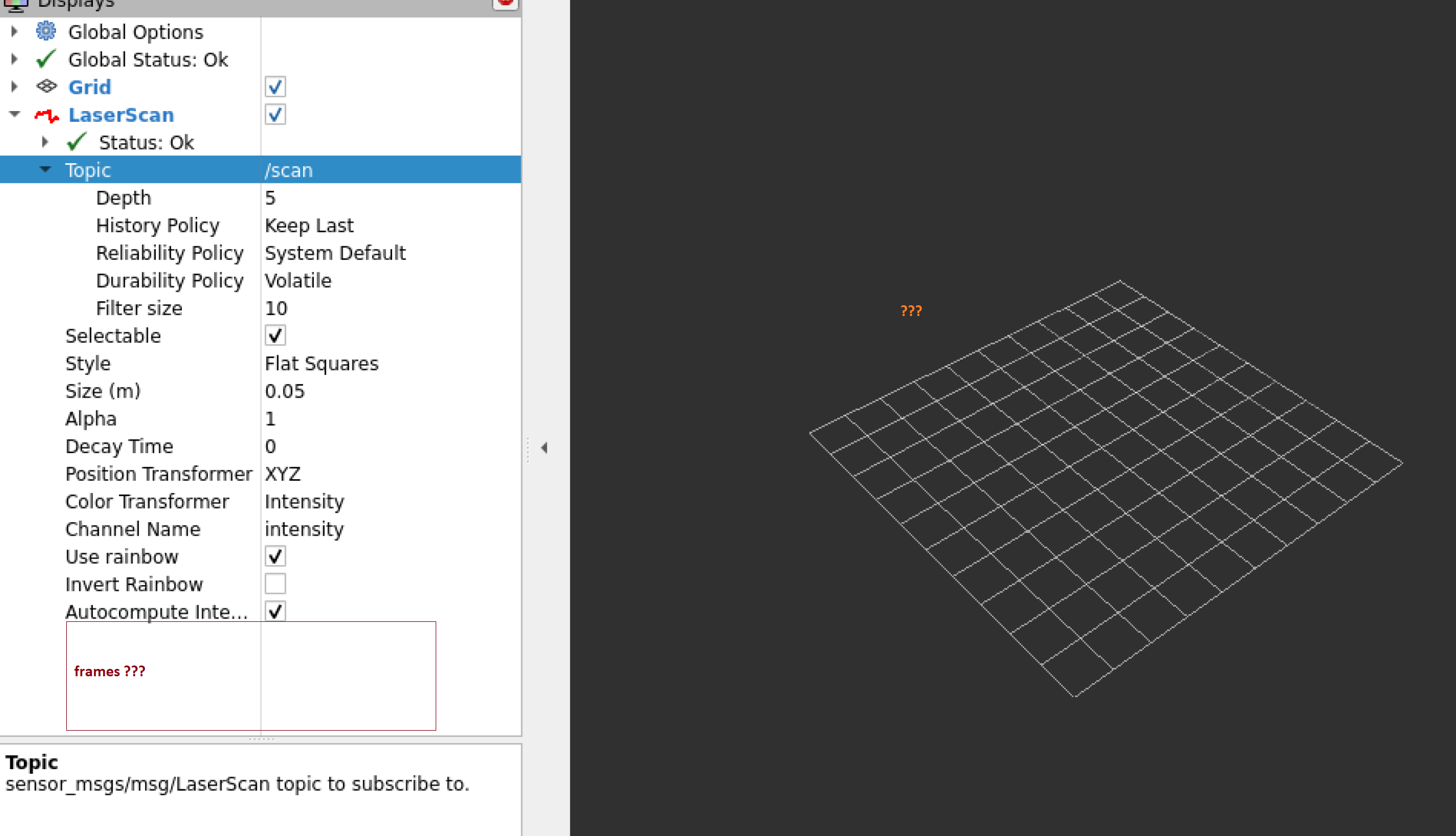
RVIZ is listening to an ongoing /scan topic
yet...no frames
am I missing something ?
thanks for your help
add a comment
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
Hi,
RVIZ is listening to an ongoing /scan topic
yet...no frames
am I missing something ?
thanks for your help
Make sure set the gblobal frame in RVIZ2 to scan and see if it then appears. I'm pretty sure it's undr 'Global Options". That will at least confirm the scan data is there. If it is then, you are probably lacking the TFs needed transform the scan frame up to whatever frame was being used as the RVIZ2 global frame. Adding the TFs should get you there.
You tagged RVIS but this is actually RVIZ2 and there is a big difference.
global options/fixed frame is set to 'laser_frame' after running
ros2 run tf2_ros static_transform_publisher 0 0 0 0 0 0 world laser_frame
cannot paste image for some reason
still no /scan data frames, while I can echo tons of data being generated on /scan topic
seems RVIZ2 is just broken, in ROS it was working without any additional steps
I am gonna scratch my sd-card with my working ROS1 system. I wasted enough time like that
thanks for your help anyway
all I found is this, but I am not sure what/how to check https://design.ros2.org/articles/qos....
what I dont understand is that there is a :scan topic, and data are there, RVIZ should at least display data frames or at leas an error if the data format is incorrect
ok in the terminal I see an error saying Sensitivity is not supported, this used to work in ROS1 it says supported modes are Standard,Express,Boost how do I setup these modes in RVIZ ?
Asked: 2023-07-28 11:20:53 -0500
Seen: 243 times
Last updated: Jul 28 '23
"Could not find requested resource in ament index" - When loading component into a container
ROS 1 Bridge running in docker container not receiving published topics from ROS 2 humble
Issues with hector_mapping using lidar lite v3 on servo
Nav2 simple commander's getGlobalCostmap()
[ROS2] Odometry with Velocity feedback
[Nav2] Suggestions around single plan - controller only reactive navigation
Communication bewtween humble and foxy
Costmap creation from 3D mapping
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.