
Odometry TF late in time when published with EKF
Hi!
Something strange happens with my simpliest config robot (simulated withGazebo)
I have simple EKF config, and when
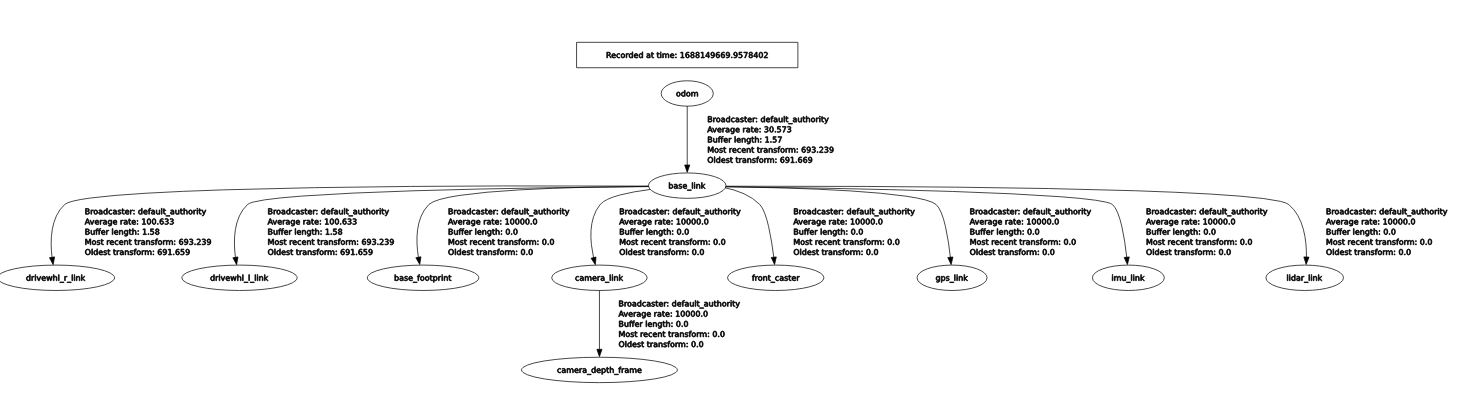
- the odom->base_link TF is published by EKF filter node I have my odometry frame very slow, the robot has already stopped, the wheels aren't rotating, but odometry is still in movement, like in some time-slowdown mode:
- odom->base_link published by gazebo differential drive plugin - it's smooth and precise:
ros Iron and gazebo are up-to-date all nodes use sim-time and have good frequency
What should I check, please help me. Thanks!
EKF node yaml: for the first case
ekf_filter_local_node:
ros__parameters:
use_sim_time: true
frequency: 30.0
sensor_timeout: 0.1
transform_time_offset: 0.0
two_d_mode: true
publish_acceleration: true
publish_tf: true
print_diagnostics: true
debug: false
reset_on_time_jump: true
# transform odom->base_link
map_frame: map # Defaults to "map" if unspecified
odom_frame: odom # Defaults to "odom" if unspecified
base_link_frame: base_link # Defaults to "base_link" if unspecified
world_frame: odom # Defaults to the value of odom_frame if unspecified
odom0: demo/odom
odom0_config: [true, true, false,
false, false, false,
false, false, false,
false, false, true,
false, false, false]
gazebo diff-drive plugin is
<plugin name='diff_drive' filename='libgazebo_ros_diff_drive.so'>
<ros>
<namespace>/demo</namespace>
</ros>
<!-- wheels -->
<left_joint>drivewhl_l_joint</left_joint>
<right_joint>drivewhl_r_joint</right_joint>
<!-- kinematics -->
<wheel_separation>0.4</wheel_separation>
<wheel_diameter>0.2</wheel_diameter>
<!-- limits -->
<max_wheel_torque>20</max_wheel_torque>
<max_wheel_acceleration>1.0</max_wheel_acceleration>
<!-- output -->
<publish_odom>true</publish_odom>
<publish_odom_tf>false</publish_odom_tf>
<publish_wheel_tf>true</publish_wheel_tf>
<odometry_frame>odom</odometry_frame>
<robot_base_frame>base_link</robot_base_frame>
</plugin>
[EDIT]
in 30 minutes odom is far-far late in time, seems, odom will react in an hour after the movement is done:
add a comment
