
Issues with Mapping SUMMIT HL

Hi guys!
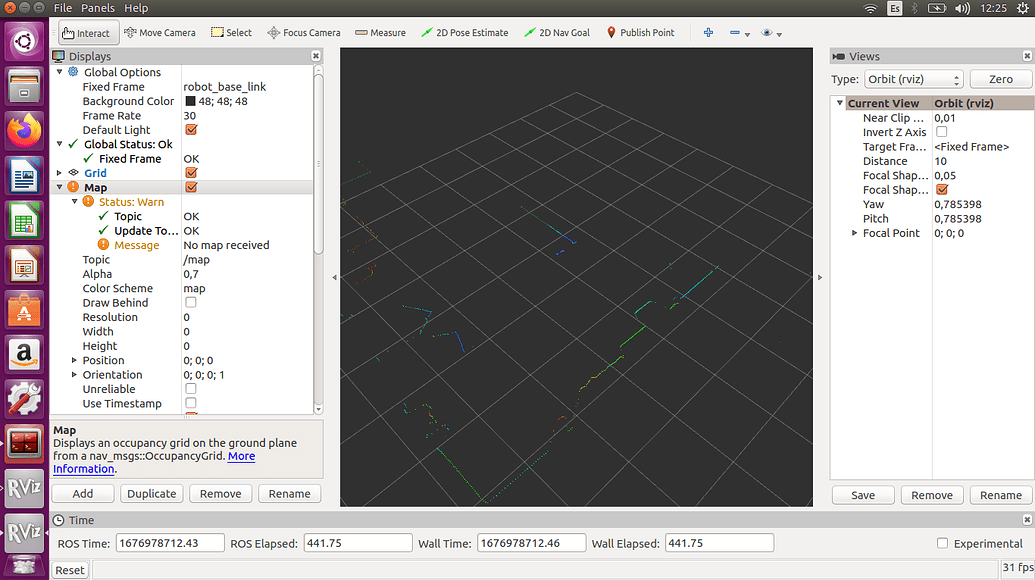
I have an issue with our SUMMIT HL - ROS Kinetic about creating maps. At the time that I want to create/see the map at RVIZ, it appears a WARNING message of “No map received” on the section “Map” as you can see in the screenshot.
I had tried the following command to launch the maps roslaunch summit_xl_localization slam_gmapping.launch, but it hadn't worked. I got this response from the command:
roslaunch summit_xl_localization slam_gmapping.launch
… logging to /home/summit/.ros/log/0345347c-b1d9-11ed-b1bb-0030180d6edc/roslaunch-SHL00-191011AA-3126.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://SHL00-191011AA:33415/
SUMMARY
========
PARAMETERS
/rosdistro: kinetic*
/rosversion: 1.12.14*
/slam_gmapping/angularUpdate: 0.1*
/slam_gmapping/astep: 0.05*
/slam_gmapping/base_frame: summit_xl_base_link*
/slam_gmapping/delta: 0.05*
/slam_gmapping/iterations: 5*
/slam_gmapping/kernelSize: 1*
/slam_gmapping/lasamplerange: 0.005*
/slam_gmapping/lasamplestep: 0.005*
/slam_gmapping/linearUpdate: 0.2*
/slam_gmapping/llsamplerange: 0.01*
/slam_gmapping/llsamplestep: 0.01*
/slam_gmapping/lsigma: 0.075*
/slam_gmapping/lskip: 0*
/slam_gmapping/lstep: 0.05*
/slam_gmapping/map_frame: summit_xl_map*
/slam_gmapping/map_udpate_interval: 2.0*
/slam_gmapping/maxUrange: 16.0*
/slam_gmapping/odom_frame: summit_xl_odom*
/slam_gmapping/ogain: 3.0*
/slam_gmapping/particles: 100*
/slam_gmapping/resampleThreshold: 0.5*
/slam_gmapping/sigma: 0.05*
/slam_gmapping/srr: 0.1*
/slam_gmapping/srt: 0.2*
/slam_gmapping/str: 0.1*
/slam_gmapping/stt: 0.2*
/slam_gmapping/temporalUpdate: 3.0*
/slam_gmapping/xmax: 50.0*
/slam_gmapping/xmin: -50.0*
/slam_gmapping/ymax: 50.0*
/slam_gmapping/ymin: -50.0*
NODES
/*
slam_gmapping (gmapping/slam_gmapping)*
ROS_MASTER_URI=http://SHL00-191011AA:11311
process[slam_gmapping-1]: started with pid [3271]
After that, I couldn’t visualize or receive any map in RVIZ. It show the message that you can in the screenshot above "WARNING message".
Also, I had tried a basic command to launch the map rosrun gmapping slam_gmapping scan:=<laser_scan_topic_name_in_summit_xl>, but it didn't work either. The response was:
*rosrun gmapping slam_gmapping scan:=/robot/front_laser/scan
[ WARN] [1677139925.295843110]: MessageFilter [target=odom ]: Dropped 100.00% of messages so far. Please turn the [ros.gmapping.message_notifier] rosconsole logger to DEBUG for more information.
[ WARN] [1677139985.296373562]: MessageFilter [target=odom ]: Dropped 100.00% of messages so far. Please turn the [ros.gmapping.message_notifier] rosconsole logger to DEBUG for more information.
^Cvirtual GMapping::GridSlamProcessor::~GridSlamProcessor(): Start
virtual GMapping::GridSlamProcessor::~GridSlamProcessor(): Deleting tree*
And when I tried to save the map, it shows a message of “waiting for the map” without any result.
rosrun map_server map_saver -f /home
[ INFO] [1677139917.287486654]: Waiting for the map
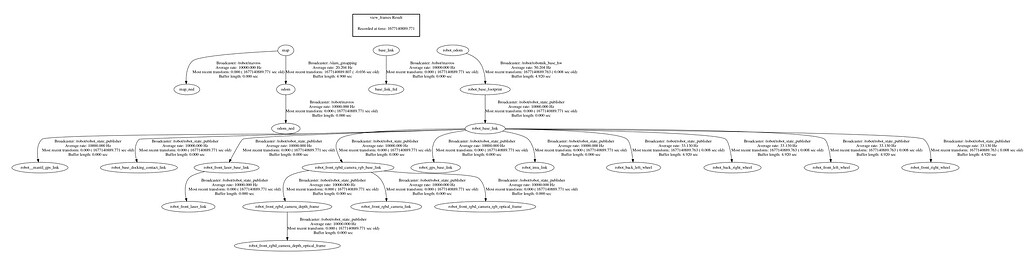
On the other hand, I think maybe the issue could be in the frames of the robot, but I'm not sure what could be wrong, maybe some connections between frames.
 .
.
If you could give me a hand, It would be great!
Best regards, Daniel.
