
TEB Viapoints are not attached to the global path.
As title, when I tried to test teb local planner on my real amr, I found that in some case, the teb viapoints were not attached to the global path, as following figure.
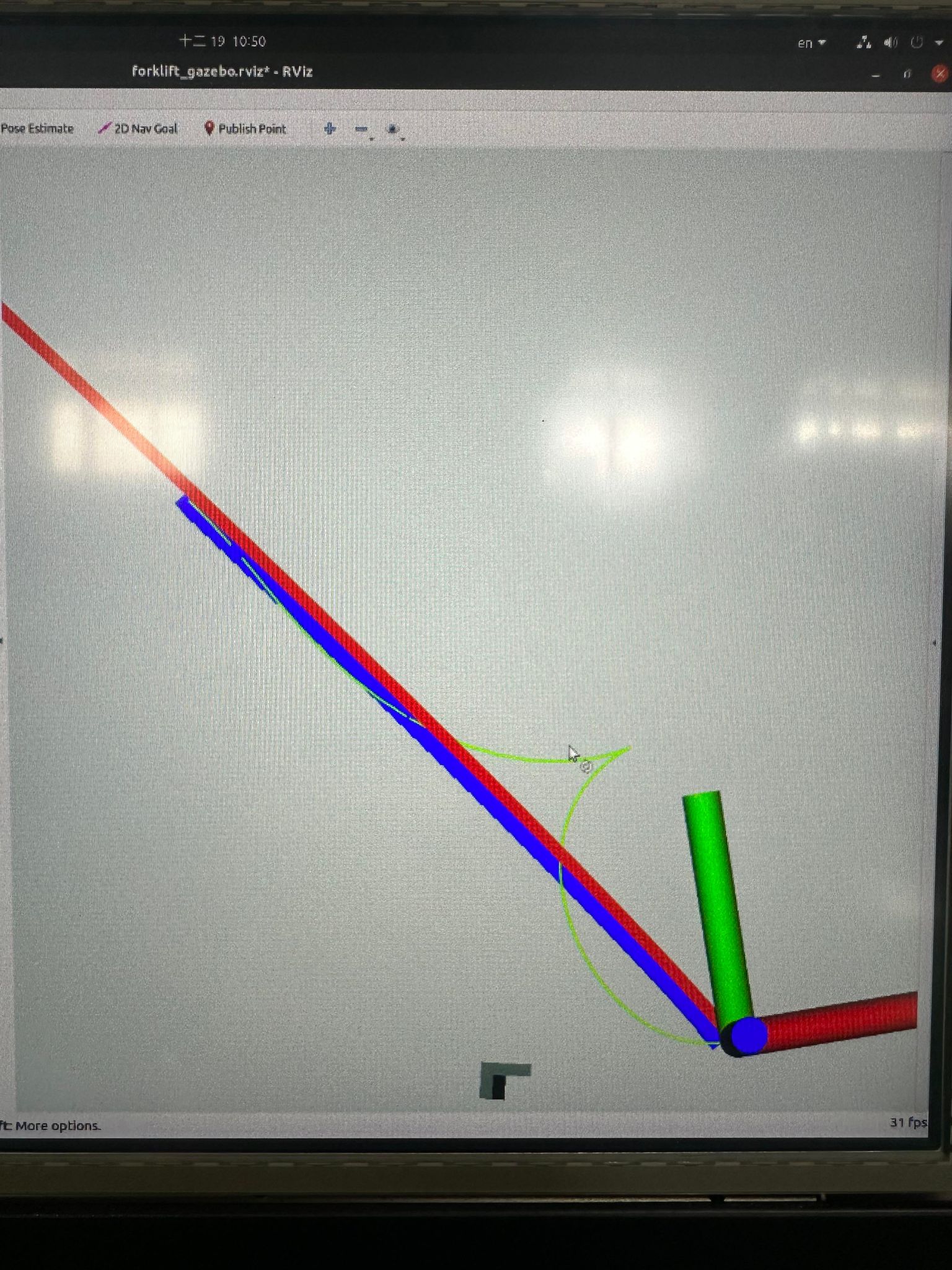
- Red Line: global path
- Blue Marker: viapoints output from teb local planner
- Green Line: teb local plan
- TF marker: my robot localization in rviz
For this problem, I looked up the source code in TEB, and found that viapoints were related to transform_plan. As a result, was this problem related to my robot localization?
add a comment
