
How to track a wall (obstacle) using tracking _pid package?
Hi
I have a mobile robot with dimension and sensor configuration (five sonar ultrasonic sensors and one IMU-9 degree of freedom) as in this photos here 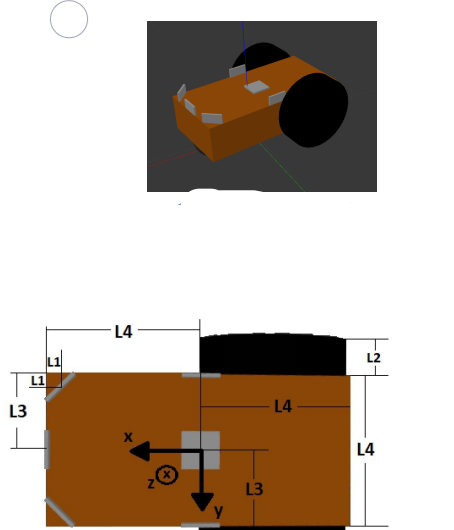 The mobile robot is using the model of differential driving motion with mixing of sensory(sonar and IMU) information. I would like to use the ROS pid tracking package ros tracking to track the wall as its in the gazebo simulation picture
The mobile robot is using the model of differential driving motion with mixing of sensory(sonar and IMU) information. I would like to use the ROS pid tracking package ros tracking to track the wall as its in the gazebo simulation picture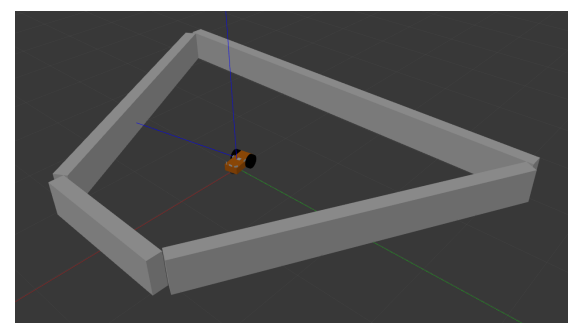 .
.
I have PID controller yaml file with is the following
mymobibot:
# Publish all joint states -----------------------------------
joint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: 50
# Effort Controllers ---------------------------------------
leftWheel_effort_controller:
type: effort_controllers/JointEffortController
joint: left_wheel_hinge
pid: {p: 100.0, i: 0.1, d: 10.0}
rightWheel_effort_controller:
type: effort_controllers/JointEffortController
joint: right_wheel_hinge
pid: {p: 100.0, i: 0.1, d: 10.0}
The starting orientation of the robot (rotation with respect to the z axis) which can be set in the launch file is:
angle = mod(X,π) (in rad)
I would like to creates ROS nodes that track (follow) the wall (obstacle) . In the nodes the direction of rotation (the direction in which the obstacle will be tracked) is determined. More specifically, if X is an even number, then the obstacle should be tracked clockwise (CW) with respect to the global coordinate system, while if it is odd the obstacle should be tracked anti-clockwise (CCW).
Here is the launch file with
<launch>
<!-- these are the arguments you can pass this launch file, for example paused:=true -->
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<arg name="yaw_init" default="0.0"/>
<!-- Load the URDF into the ROS Parameter Server -->
<param name="robot_description"
command="$(find xacro)/xacro '$(find mymobibot_description)/urdf/mymobibot.xacro'" />
<!-- We resume the logic in empty_world.launch, changing only the name of the world to be launched -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find mymobibot_gazebo)/worlds/mymobibot_wf.world"/>
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- Run a python script to the send a service call to gazebo_ros to spawn a URDF robot -->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model mymobibot -Y $(arg yaw_init) -param robot_description"/>
<!-- Run RVIZ-->
<!--node name="$(anon rviz)" pkg="rviz" type="rviz" args="$(find mymobibot_gazebo)/mymobibot.rviz" output="screen"/-->
<!-- ros_control mymobibot launch file -->
<include file="$(find mymobibot_control)/launch/mymobibot_control.launch" />
</launch>
And the control launch
<launch>
<!-- Load joint controller configurations from YAML file to parameter server -->
<rosparam file="$(find mymobibot_control)/config/mymobibot_control.yaml" command="load"/>
<!-- load the controllers -->
<node name="controller_spawner" pkg="controller_manager" type="spawner" respawn="false"
output="screen" ns="/mymobibot" args="joint_state_controller
rightWheel_effort_controller
leftWheel_effort_controller"/> ...