
About the Point Cloud Coordinate System Issued by the RGB-D Camera
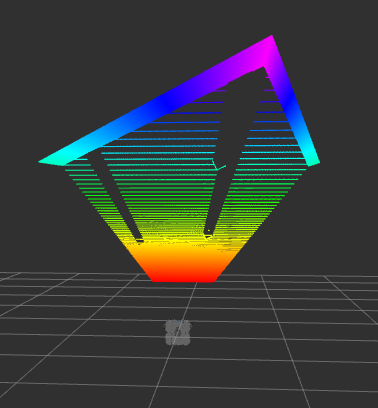
I found a strange problem when I used the turbobot3 simulation.Why The point cloud direction published by camera_rgb_optical_frame is upward.
add a comment
