
[Nav2] Planner does not respect obstacles from costmap filter [closed]
Hi,
I am using keepout costmap filter (as shown in above picture), pink color area is from keepout zone in trinary map mode.
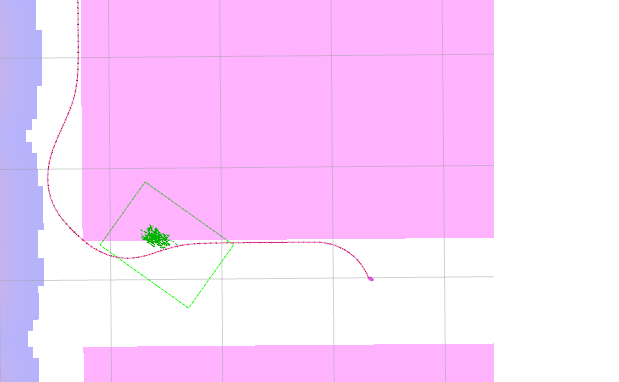
When using SMAC Lattice planner, the path generated is so close to obstacles (keepout) that it's definitely colliding with it (pink with robot footprint). I don't understand why it is like that? Isn't planner supposed to check for collision w.r.t. the footprint (Green box in this case.)? (That is to keep footprint out of the pink area)
Also in this video: https://www.youtube.com/watch?v=IZnkLtdv3BU&ab_channel=StevenMacenski
It looks like costmap contain inflation layer around the keep out zone. Seems like I am missing something in the docs as inflation is not automatically generated for keepout? Maybe in video, is it that keepout map have pre-generated inflation data in keepout map itself?
Thanks

Possibly just blind, but is there a link to the duplicate somewhere? I'm having the same issue.
here