
How to edit plant_sim in pid controller of ros?
Hello everyone
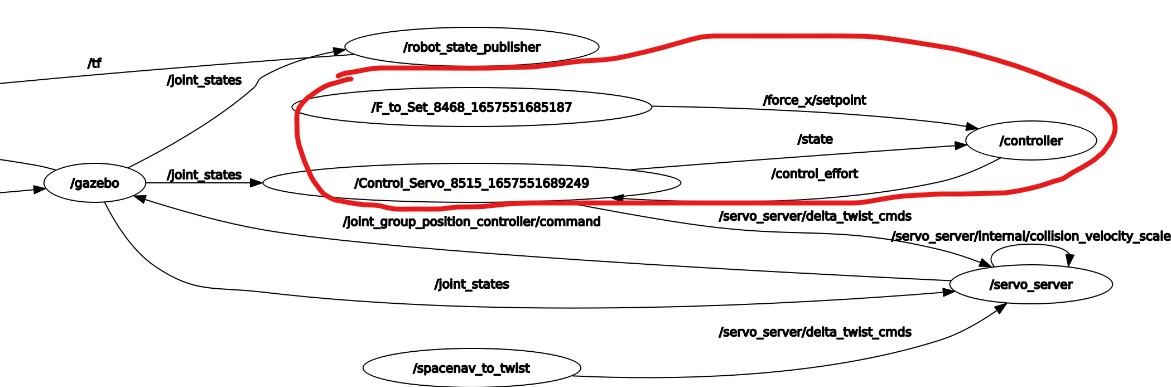
I'm having trouble using ros pid, which I'm using for the first time. Now I can send external messages (F_to_Set node) as a setpoint to the pid controller (controller node) and I have created another node (Control_Servo node) to receive control_effort. Let's convert the message type before sending it to the robot control node and get the states back to return the controller.
The problem is that from now on, during launch I get a warning message in the terminal saying plant_sim is not yet enabled, which I intentionally turned off initially due to lack of knowledge. As a result, no effort was sent to control_servo. Now when I try to open it back when I run launch it has the effort value (check with rqt_plot) but it creates a new node according to the code below and loops the values in there. Values are not sent to be converted and sent to control the robot at all.
<node name="servo_sim_node" pkg="pid" type="plant_sim" output="screen" >
<param name="plant_order" value="2" />
</node>
How should I edit the plant_sim or should I use another method with this pid to control the robot? (I'm currently controlling the robot using an external device via servo_server)
