
Moveit Octomap from Tutorial not working
Hello,
I'm following this tutorial on my own robot. I implemented a depth camera which works and displays a pointcloud in Rviz. The topic given to the octomap plugin is the same: /camera/depth/points .
When starting the robot the rostopic /move_group/monitored_planning_scene which normally should have the collision scene by the octomap does not carry any data, Rviz therefore does not display anything either.
I also tried implementing the node itself, this is the launch file:
<launch>
<node pkg="octomap_server" type="octomap_server_node" name="octomap_server">
<param name="resolution" value="0.01" />
<param name="frame_id" type="string" value="camera_depth_frame" />
<!-- maximum range to integrate (speedup!) -->
<param name="sensor_model/max_range" value="5.0" />
<!-- data source to integrate (PointCloud2) -->
<remap from="cloud_in" to="/camera/depth/points" />
</node>
</launch>
The node starts, but all it's published topics are empty, besides:
* /octomap_server/parameter_descriptions
* /octomap_server/parameter_updates
In the terminal I get the error:
MessageFilter [target=camera_depth_frame ]: Dropped 100.00% of messages so far. Please turn the [ros.octomap_server.message_filter] rosconsole logger to DEBUG for more information.
I don't really understand it and have tried googling it, with not much success.
Those are my tf frames if that helps:
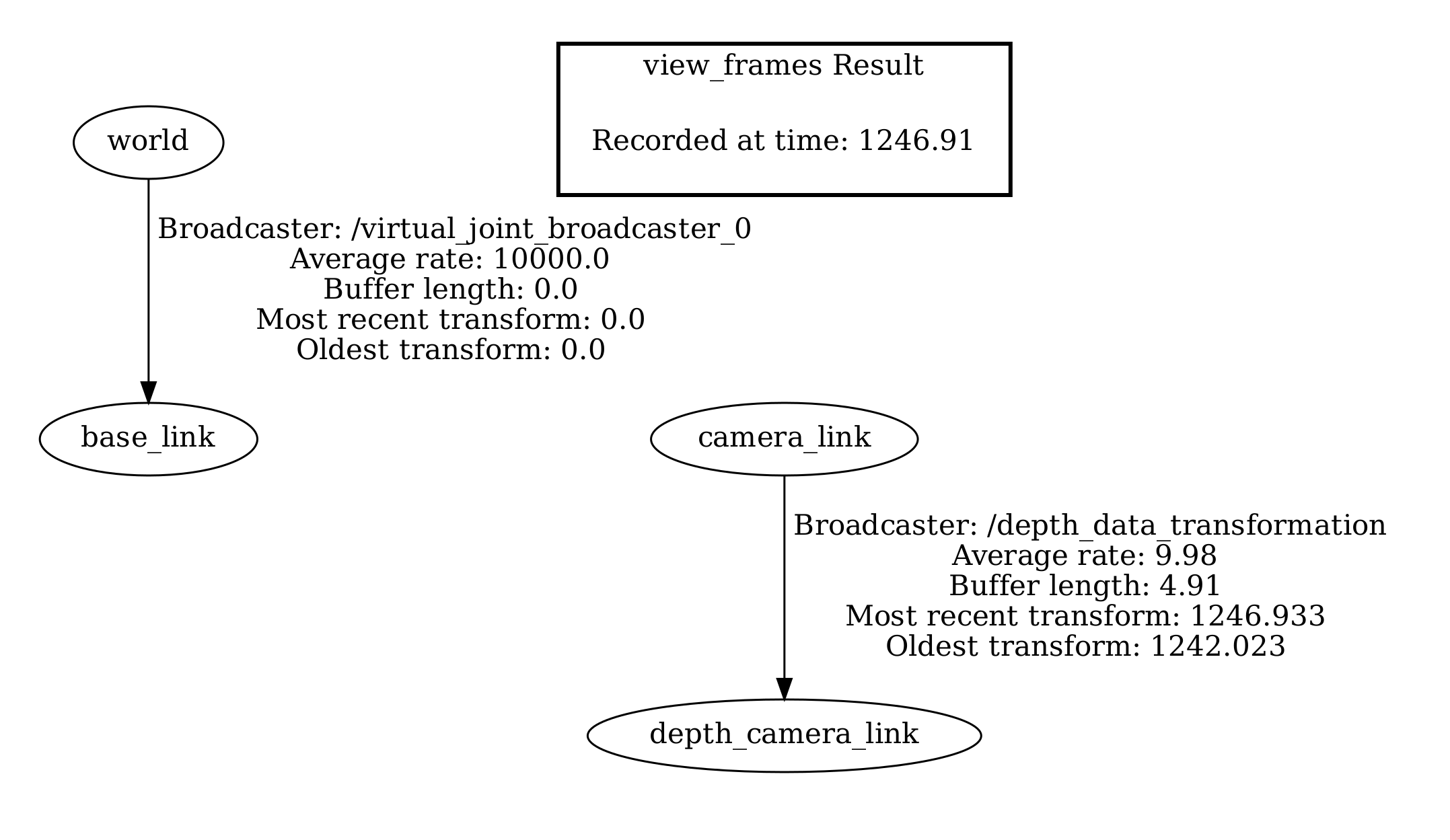
I am using ROS Noetic/Gazebo 11.9.0/rviz 1.14.14, my system is Ubuntu 20.04. Anyone knows what the problem might be?
Thanks a lot for reading!
