
Adding an end-effector hot-wire cutter to the ABB IRB-120 Robot
Hi there,
I am currently attempting to simulate the ABB IRB120 robot as a Robotic Hot-wire cutter on Gazebo. I have managed to download the catkin workspace and necessary packages in order to load the robot on Gazebo. I have also managed to control the robot' joints via MATLAB.
For my next step, it is required to attach an end-effector to the robot. I am familiar with the fact that the end - effector by creating a .xacro file as shown in the following link:
http://wiki.ros.org/Industrial/Tutori...
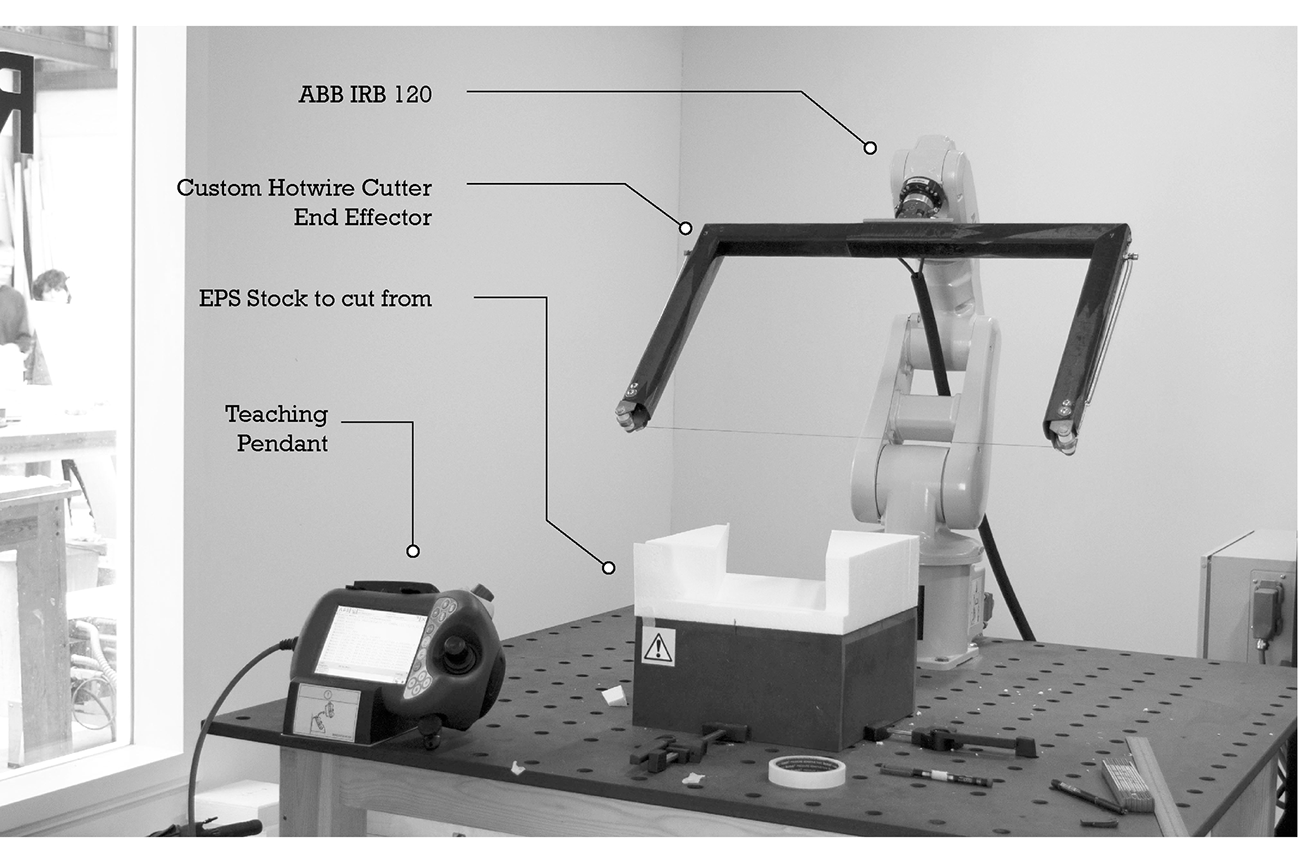
However, I am not sure how to visually create the end-effector itself. How can this be done? Is it required to use a specific program? Are there any end-effectors that are readily available? Note that the end - effector that is required to be used can be seen in the image below. ![image description] (https://avishek-das.github.io/images/...)
Thanks in advance, Jacob.

{kind=link}