
Exception thrown while trying to run turtlebot simulation with ThetaStarPlanner? [closed]
The exception is highlighted in the image below

Required Info:
- Operating System:
- Ubuntu 20.04
- ROS2 Version:
- Galactic
- Version or commit hash:
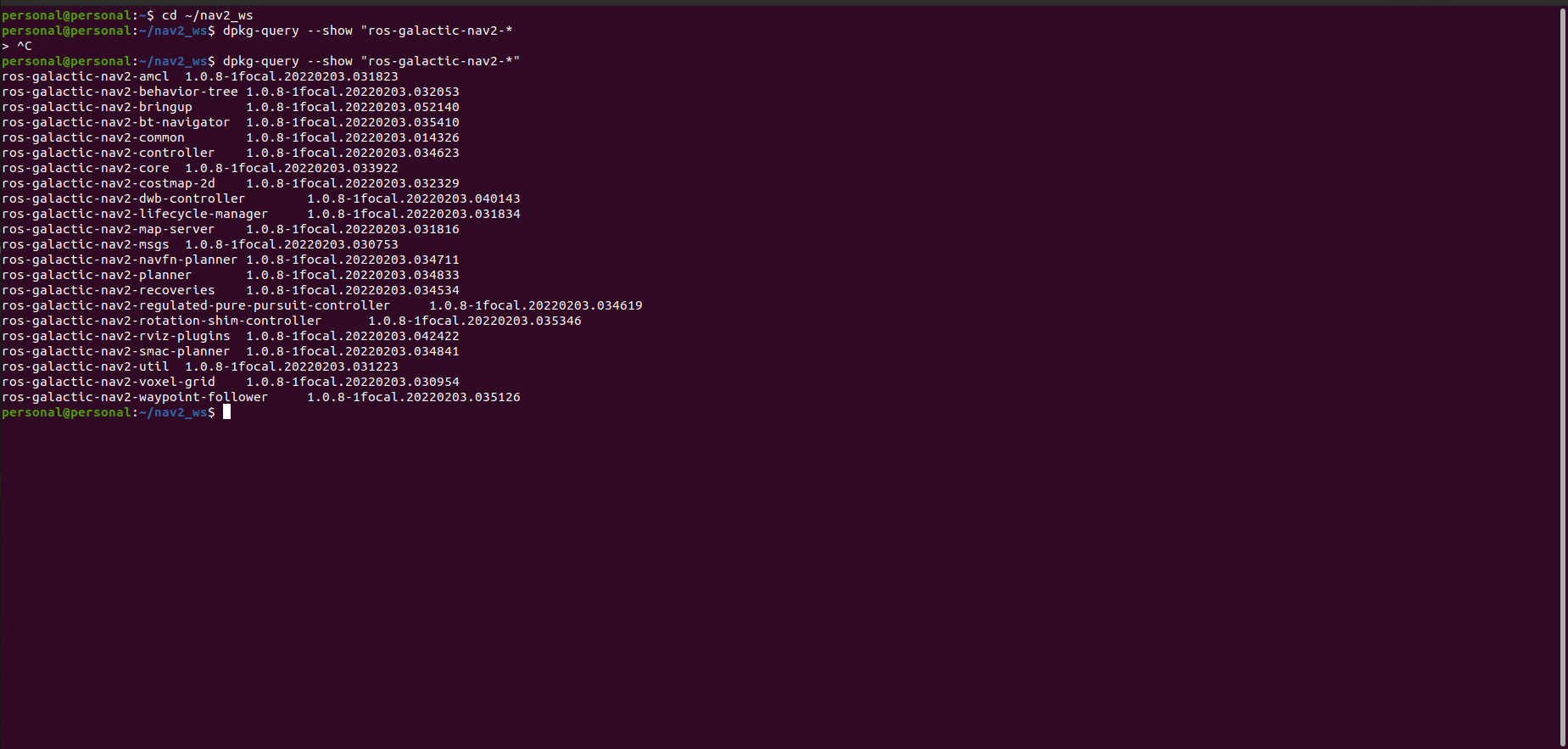
- After executing the command
dpkg-query --show "ros-$ROS_DISTRO-nav2-*",
I see the navfn-planner and smac-planner but not the theta planner. I am not sure why that is happening
- DDS implementation:
- Default
Steps to reproduce issue
ros2 launch nav2_bringup tb3_simulation_launch.py params_file:=/path/to/nav2_params.yaml
The default navigation2 bringup params file, nav2_params.yaml has been modified to include the theta star planner config parameters. Attached in the message

@Kishan as noted in the Support wiki page please do not post images of terminals or text as the content of the images is not searchable. If you could please edit your question and replace the images with the actual terminal output (formatted in a code block with the
101010button) it would be much appreciated.Hi @jarvisschultz, thanks for the review but I am just gonna close it as I got its resolution on ros-planning/navigation2 issue https://github.com/ros-planning/navig...