Going from simulations to physical setup
Hello, I am soon going to move from simulation to working on a physical robot. Up until now I have only worked in simulations with Gazebo, and all my nodes and files are working fine in the simulations. I'm wondering what changes will have to be made to the files when I use a physical turtlebot.
When I simulate I have a lot of terminals open, I run my launch file which sets up the world and robots in Gazebo on one terminal, and then have one terminal for each of the nodes.
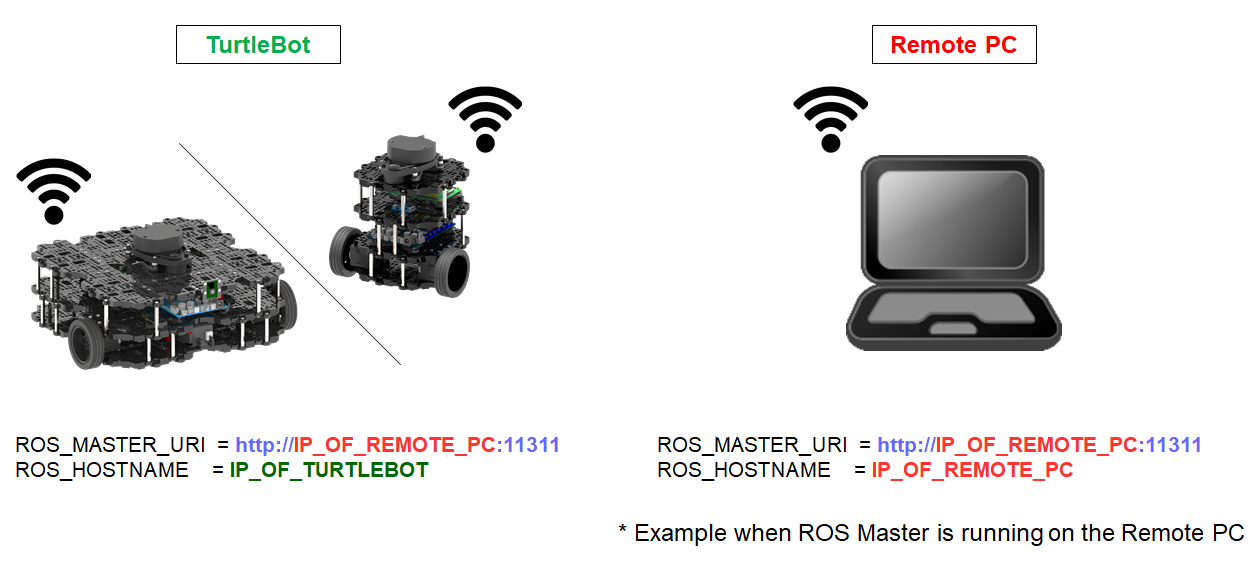
From what I understand, when you use a physical setup you have a remote PC that runs the roscore, and then you launch the turtlebot3_bringup launch file on the actual turtlebot. (https://github.com/ROBOTIS-GIT/turtle...).
What is done after this? Do I run the nodes on the remote pc or on the turtlebot? Would my nodes work on the physical setup if they worked in the simulations?
Thanks in advance.