
3D pointcloud processing- ortographic projection
I have pointcloud (with rgb data) from table-top stereo camera. I need to make ortographic projection (without persprective) to obtain picture where i can measure objects laid on the table.
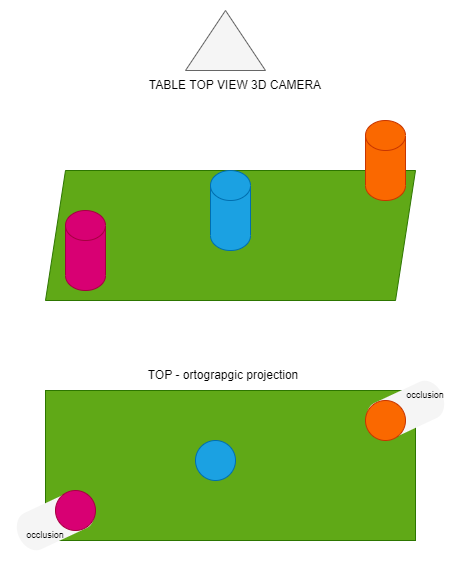
On output i should receive transformed RGB and depth. How to do this? Any ideas?

The subject of perspective mapping is far more general than ros, and I'm sure that a google search will give you dozens of hits on the linear algebra calculation to use. If you are asking if standard ros includes this functionality, then as far as I know, the answer is "No."