
No velocity or acceleration of link in gazebo_ros2_control_demo position example?

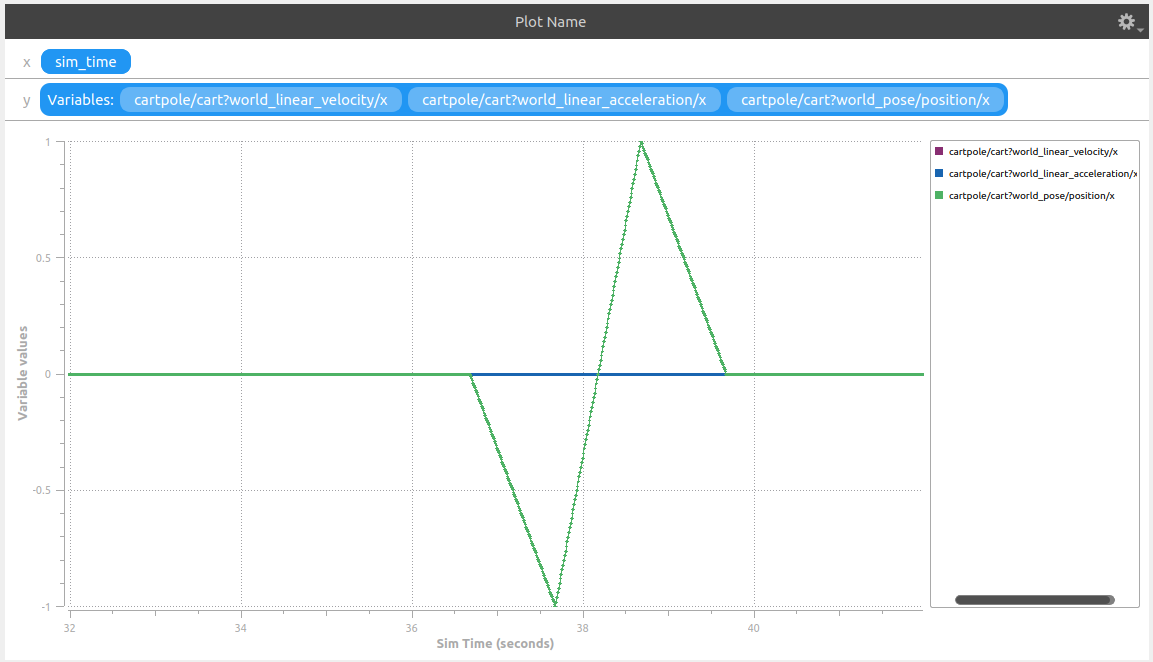
I was looking at the gazebo_ros2_control_demos/cart_example_position.launch.py and am confused why gazebo doesn't report the link having any velocity or acceleration even though the position is clearly changing.
Why is that and what implications does this have for simulations where inertia of the link is important?
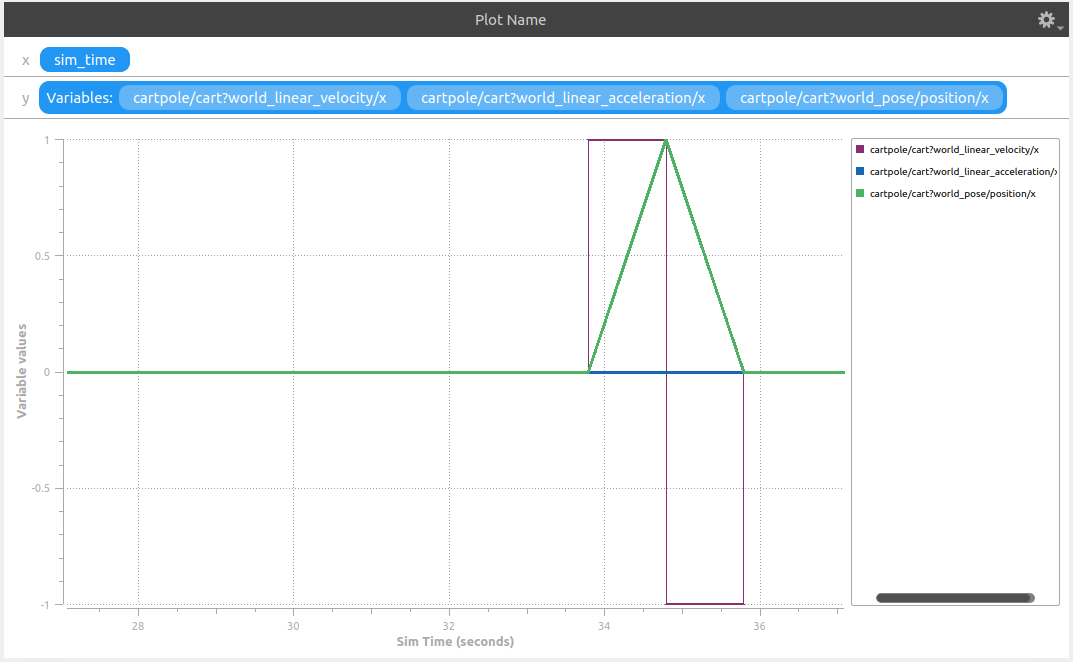
Similarly, velocity example has link at zero acceleration:
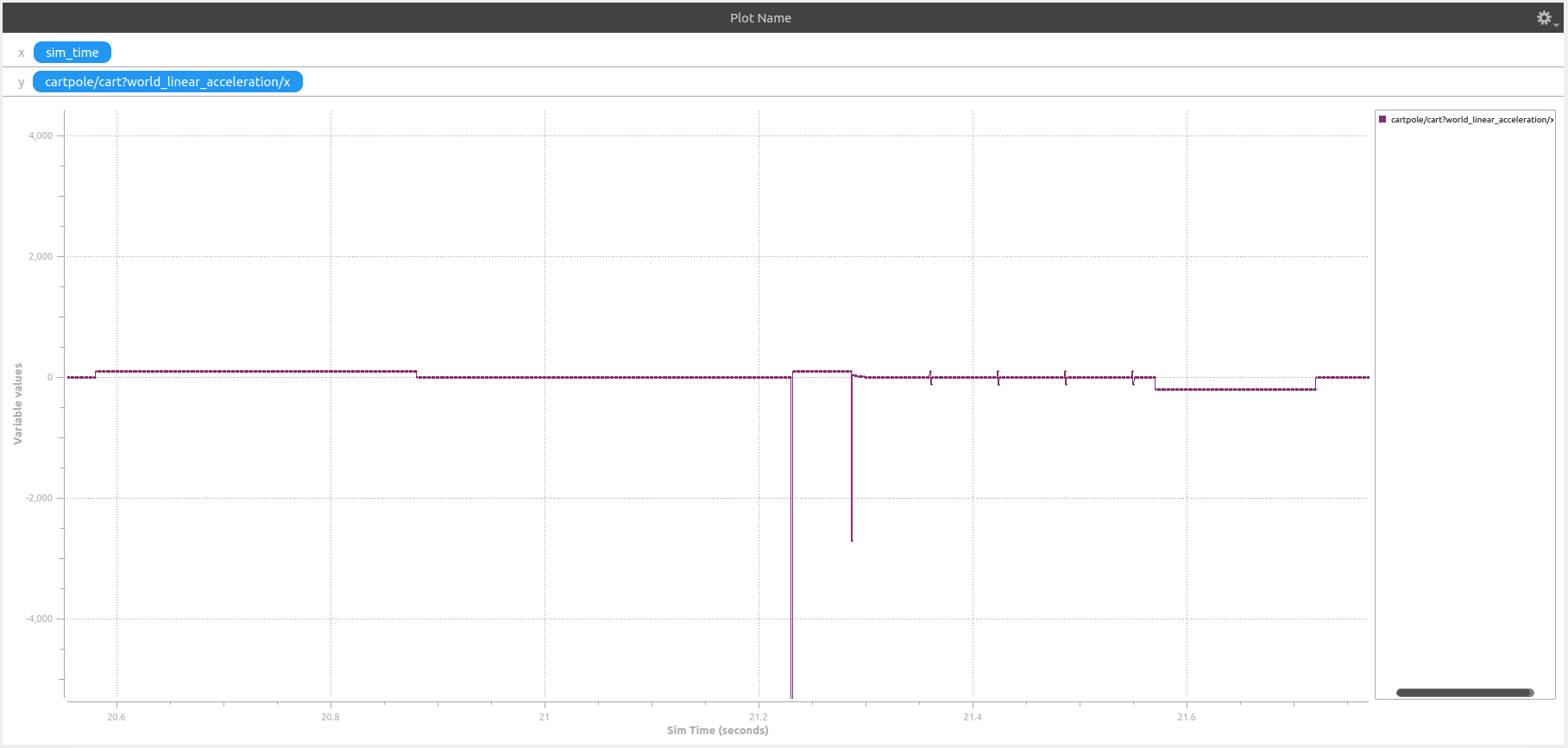
While effort example is what I expected of all three: non-zero position, velocity, and acceleration:
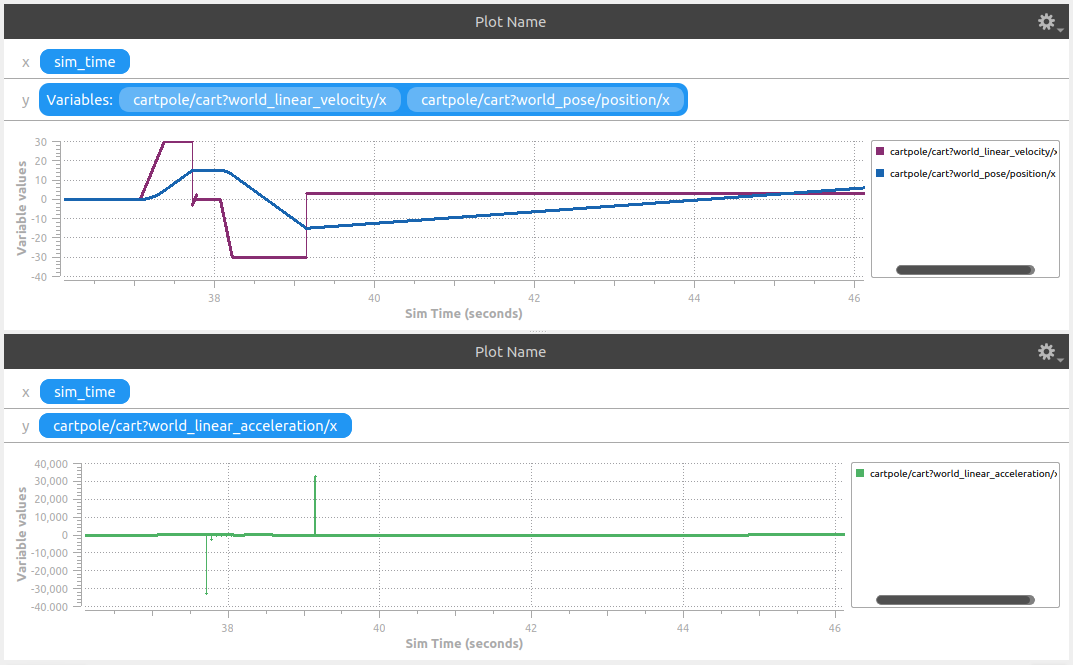
but is still confusing because the demo applies effort of 100 for 1s, then effort of -200 for 1s, then returns to zero. The plot shows two sections of acceleration equal to 100 followed by a section of -200.
Any help in understanding what's going on in the simulator in each of the three cases would be appreciated.
