Failed to fetch current robot state
Hello, I am trying to implement a simple move_group test but I am having an issue with Failed to fetch current robot state. The MotionPlanning tool within RViz works fine, only my node does not work.
What I've done so far:
1) remap /joint_states to /schunk_with_spinbot_a03_r850/joint_states in move_group.launch as well as in robot_state_publisher
2) using AsynSpinner and spinner.start() in my node
This is my gazebo_controllers.yaml:
schunk_with_spinbot_a03_r850:
#Publish all joint states
joint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: 100
# Joint trajectory controller
joints_controller:
type: velocity_controllers/JointTrajectoryController
joints:
- joint_1
- joint_2
- joint_3
- joint_4
- joint_5
- joint_6
gains:
joint_1: {p: 80, i: 0, d: 0, i_clamp_min: 0, i_clamp_max: 0}
joint_2: {p: 80, i: 0, d: 0, i_clamp_min: 0, i_clamp_max: 0}
joint_3: {p: 80, i: 0, d: 0, i_clamp_min: 0, i_clamp_max: 0}
joint_4: {p: 60, i: 0, d: 0, i_clamp_min: 0, i_clamp_max: 0}
joint_5: {p: 60, i: 0, d: 0, i_clamp_min: 0, i_clamp_max: 0}
joint_6: {p: 60, i: 0, d: 0, i_clamp_min: 0, i_clamp_max: 0}
schunk_eef_joints_controller:
type: position_controllers/JointGroupPositionController
joints:
- joint_finger_1
- joint_finger_2
This is my controllers_gazebo.yaml within moveit_config package (didnt add schunk_eef_joints_controller) :
controller_list:
- name: schunk_with_spinbot_a03_r850
action_ns: joints_controller/follow_joint_trajectory
type: FollowJointTrajectory
joints: [joint_1, joint_2, joint_3, joint_4, joint_5, joint_6]
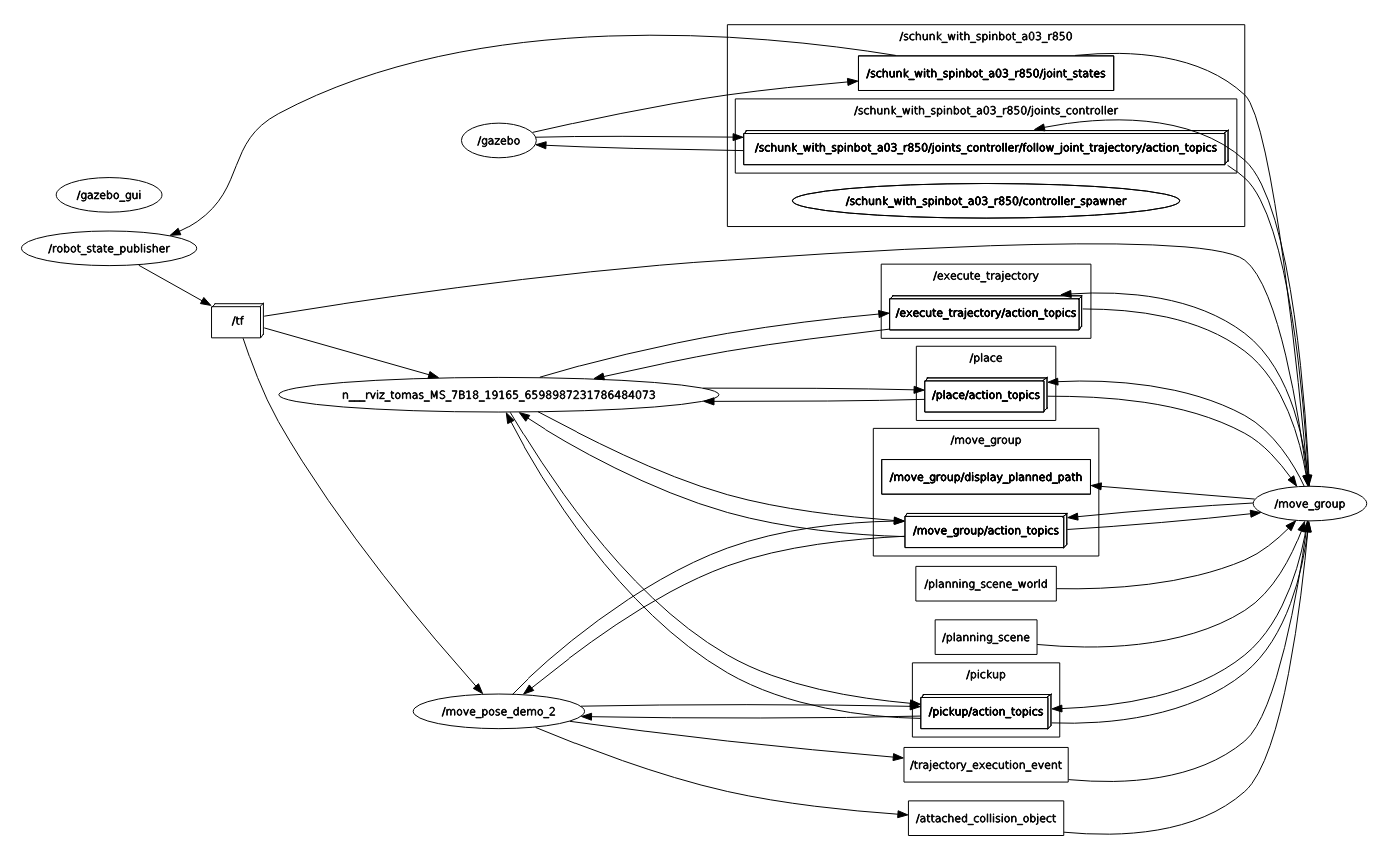
I have read somewhere that I should also remap joints within a node, but I cant find any example how to do it. Could you point me to the right direction? Also I do not know if it helps but here is a rqt_graph: