
Ros moveit pick always off set
Hello
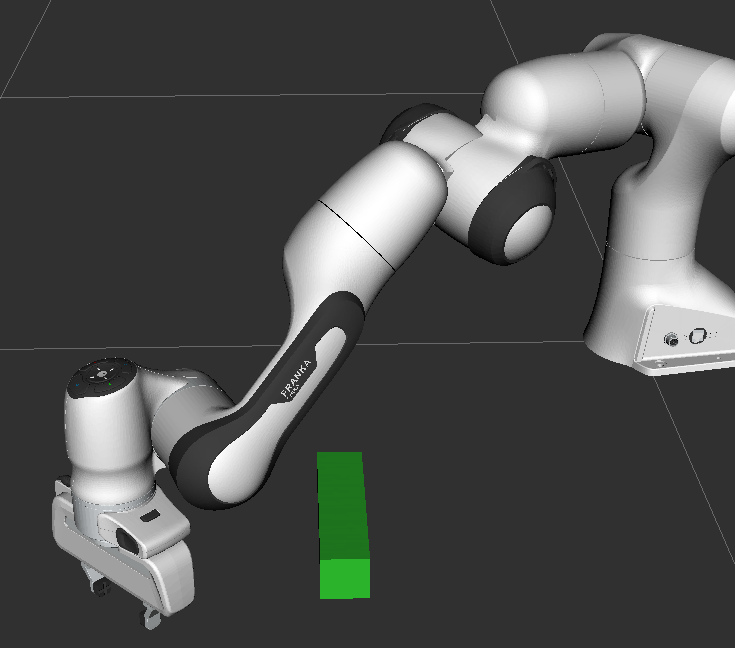
i got a Problem with the Pick comand in ros. The robot moves to the object but with an offset. When I change the quaternions of the created box, it is offset somewhere else to the object. How do I get it to move exactly to the object? Here is my code for the addbox and the pick and a picture.
def add_box(self, timeout=4):
box_name = self.box_name
scene = self.scene
box_pose = geometry_msgs.msg.PoseStamped()
box_pose.header.frame_id = "world"
box_pose.pose.orientation.w = 0
box_pose.pose.orientation.x = -1
box_pose.pose.orientation.y = 0
box_pose.pose.orientation.z = 0
box_pose.pose.position.z = 0
box_pose.pose.position.x = 0.3
box_pose.pose.position.y = 0.3
box_name = "part"
scene.add_box(box_name, box_pose, size=(0.1, 0.2, 0.05))
self.box_name = box_name
return self.wait_for_state_update(box_is_known=True, timeout=timeout)
panda_move.add_box()
panda_move.move_group.pick(object_name='part' , grasp=[],plan_only=False)
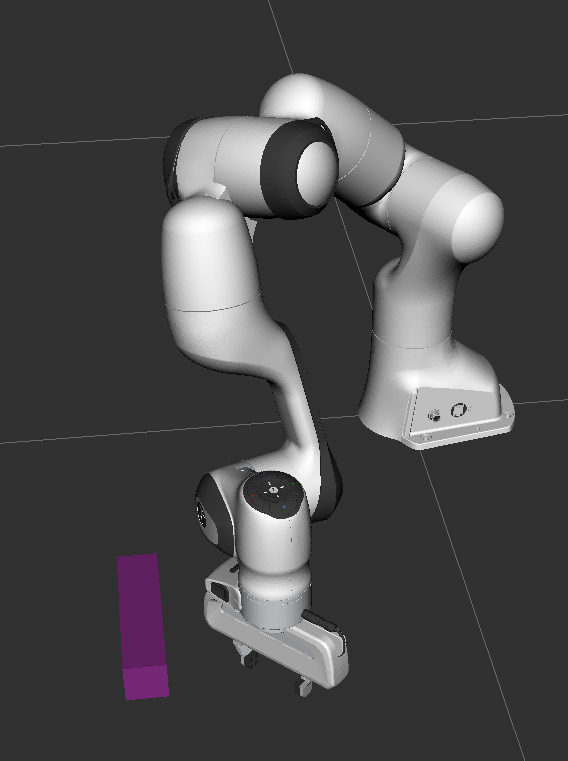
with box_pose.pose.orientation.y = 1 or with box_pose.pose.orientation.y = -1 you get this:

Your picture did not upload. Could you try again please?
Sorry for that. Now the picture should be uploaded
So your pick is always offset by this amount when you set the quaternion to this value? And the problem doesn't occur when your quaternion is neutral? What happens for other orientations?
Wenn the quaternion are w=1 and everything else is 0 the Roborter ist upside down. Wenn y=-1 the Roboter ist on the other side or somewhere else.
I'm not sure what the issue is, but I would post pictures for those test cases to get a better idea.
I updatet the post.