
Unable to Subscribe/Echo ros2 topic from outside autoware.auto
Hi,
I am trying to feed/provide lidar information in the form of ros2 topic (lidar_front/points_raw) to Run the point cloud filter transform node in Autoware.Auto
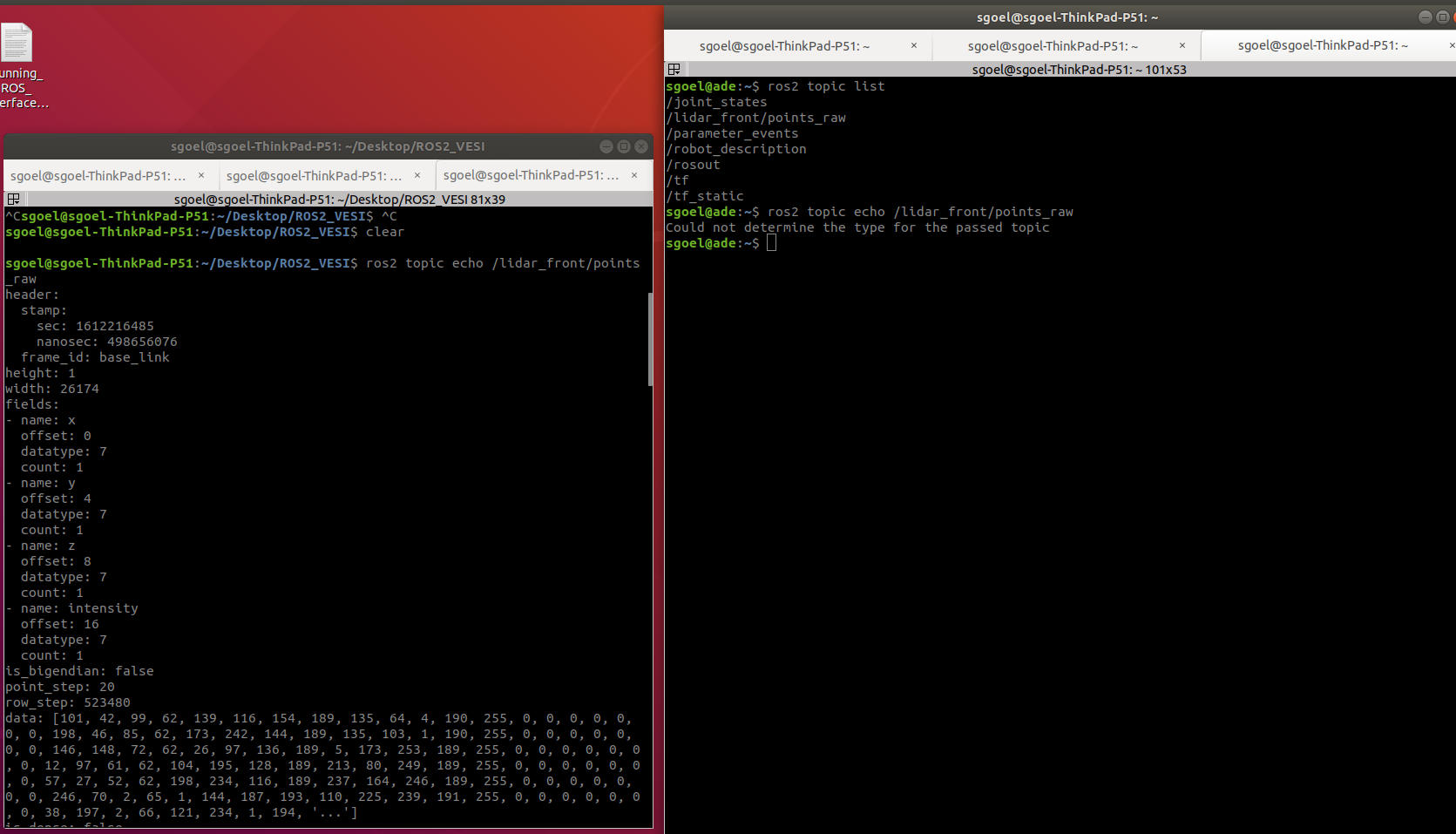
I have two terminal windows: the left one is for publishing lidar data in ros2, and the right one is for autoware.auto. I am sourcing /opt/ros/dashing/setup.bash in the left terminal and sourcing /opt/Autoware/setup.bash in the right one.
I am unable to echo the ros2 topic /lidar_front/points_raw inside the autoware.auto terminal (right terminal) and I get the error:
Could not determine the type for the passed Topic
I am able to echo this topic in the left terminal (outside ade). I am attaching a screenshot below for reference.
Could someone help me with how I can echo/subscribe to ROS2 topics inside ade that are published outside ade. Thanks.

Can you check with rqt ? Also I think you should add your source on your .bashrc
@ bekirbostanci - I was able to solve this issue, it was indeed related to sourcing the ros2 environment. I just have to source both autoware.auto as well as ros2 dashing for ros2 topics to be echoed inside ade.