
Autoware op_global_planner creates strange paths
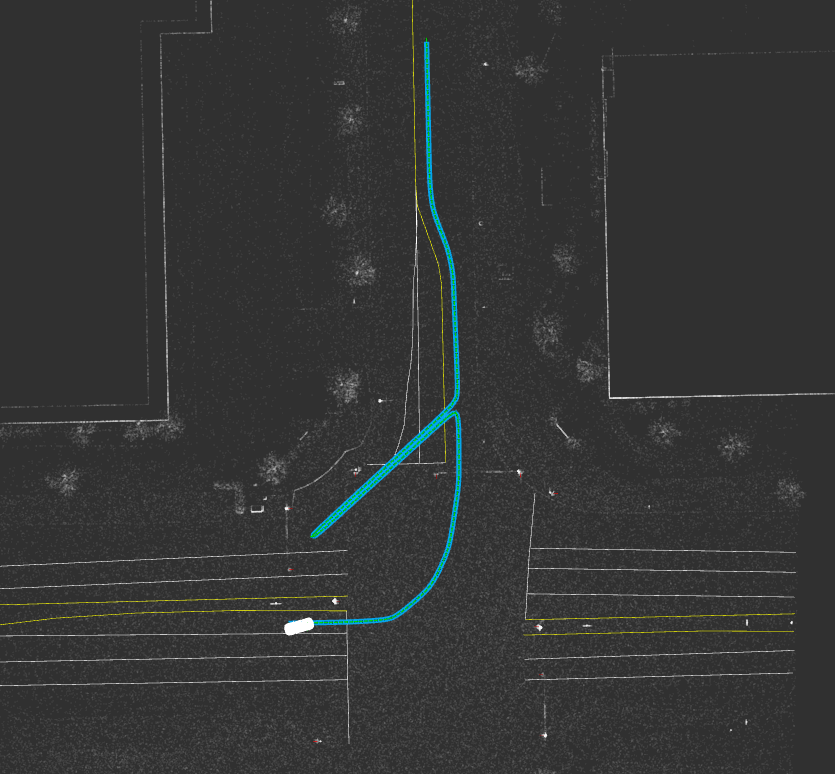
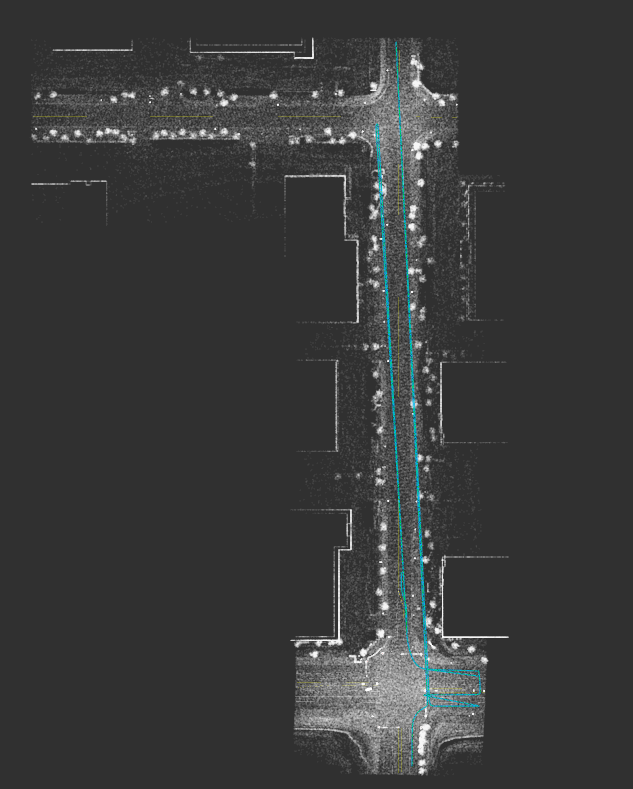
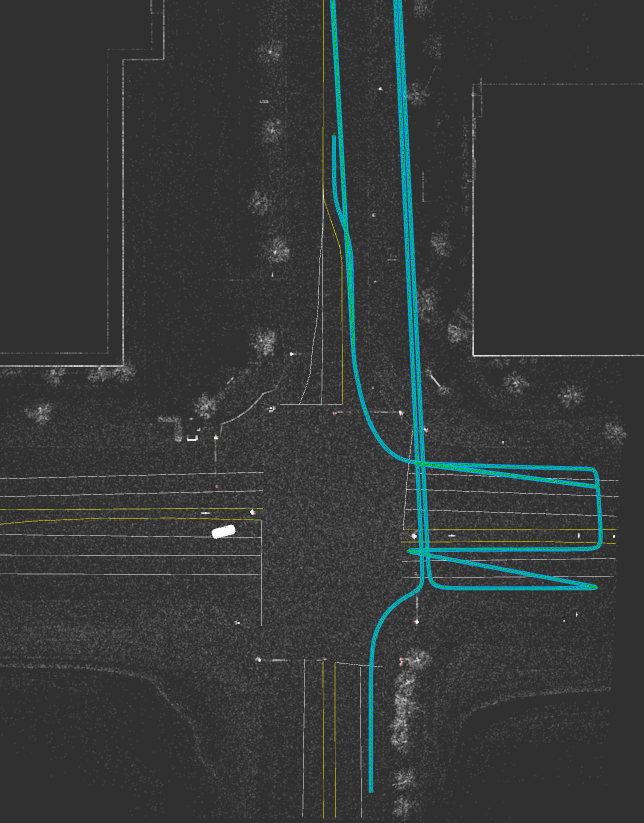
I'm trying to use op_global_planner to generate global paths on BorregasAve map provided by LGSVL/Autoware-data(from https://github.com/lgsvl/autoware-data) but it seems to be incorrectly creating the paths. Below are some weird paths generated.
Below are the steps the reproduce the issue:
Execute runtime manager
Go to "Setup" tab and enable "TF" and "Vehicle Model"
Go to "Map" tab and load Pointcloud, Vector maps and tf.launch files.
Go to "Computing" tab and enable "op_global_planner" - Make sure the map source is set to "Autoware". OR run the following command roslaunch op_global_planner op_global_planner.launch enableRvizInput:="true" mapSource:=0
Open Rviz by clicking the "RViz" button on Runtime Manager.
Use "2D Pose Estimate" and "2D Nav Goal" to set the Start-pose and Goal locations and you can see the behavior as shown in the pictures.
Any ideas why this might be happening? Note that Im using Autoware.AI version 1.13.
