
teb planner producing inconsistent results

Hi,
I'm using the teb_local_planner package within ROS Kinetic on Ubuntu 16.04 LTS.
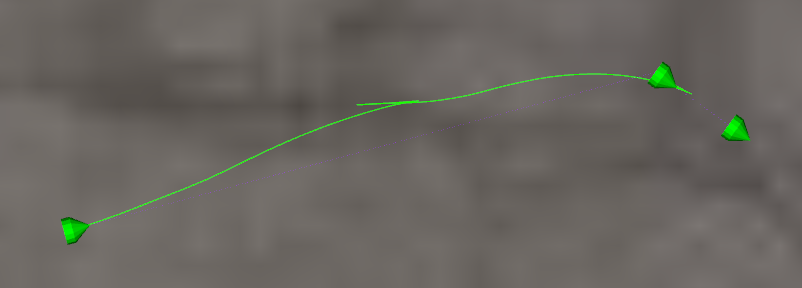
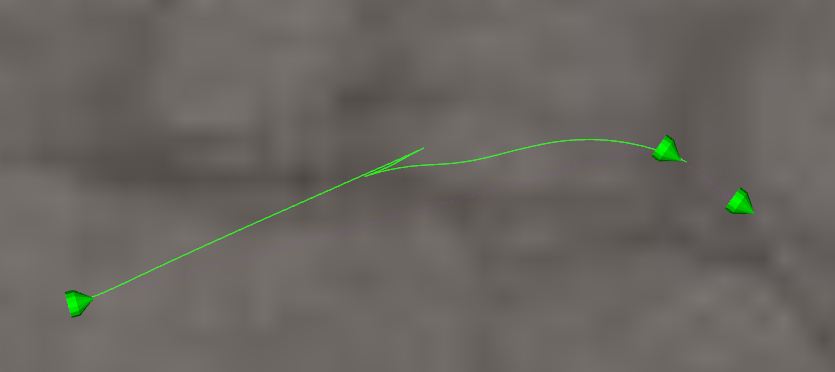
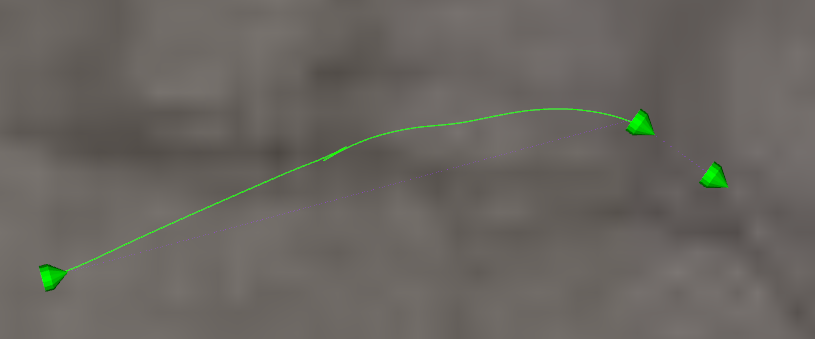
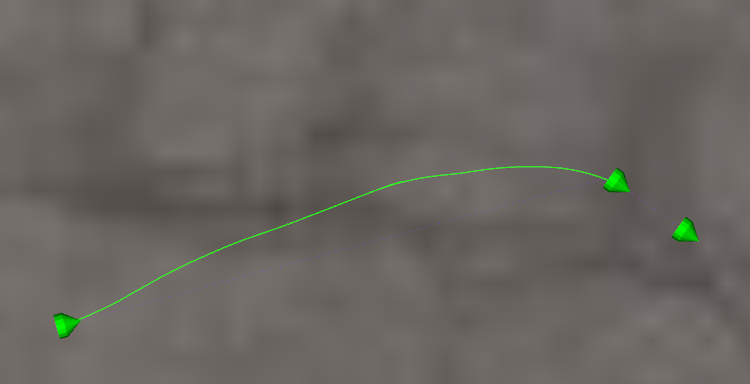
I'm seeing the teb_local planner produce inconsistent results when trying to fit a path from a start point to a goal point with no obstacles or via_points in between. In the pictures below, you can see various attempts to fit a path between the left point and the center point. In between each attempt, no changes are made, including all of the parameters that govern the planner. I simply wait 10 seconds and then re-send the same pair of poses to the planner, and the results differ significantly each time. It is as if the planner is behaving as a time-varying system.
planner_->plan(pose1, pose2);
add a comment
