
How to insert tf frames into HectorSLAM tf structure - using data from the Pixhawk 4 mini's IMU
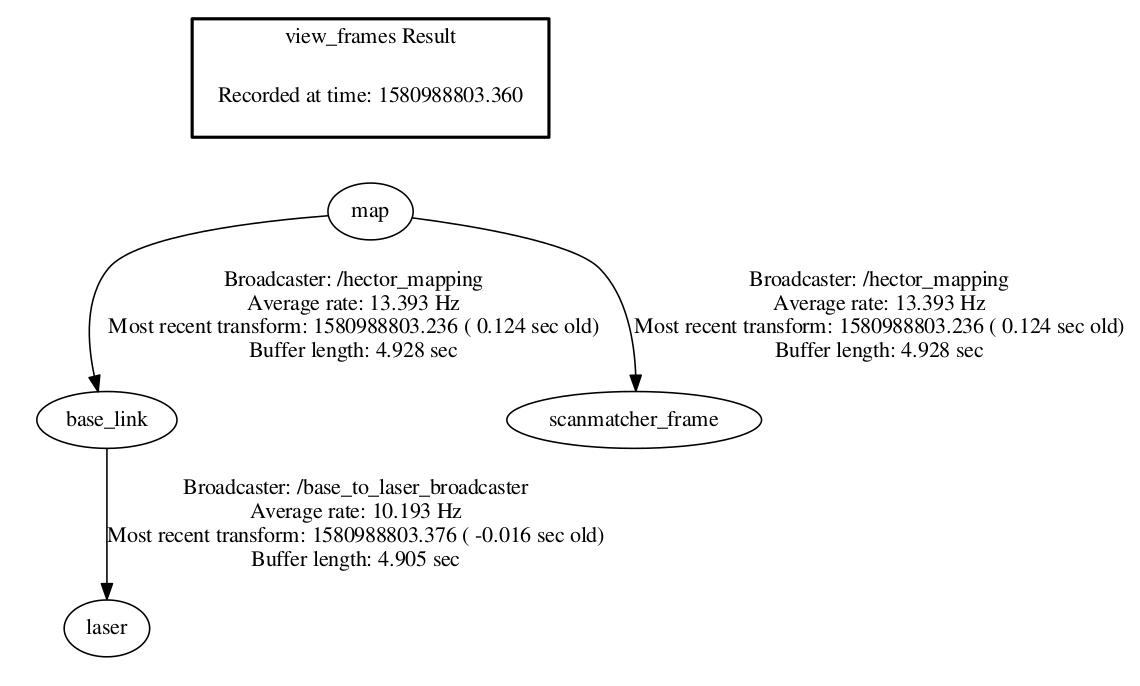
I am using HectorSLAM for a UAV application. I have setup HectorSLAM to work with just the base_link and laser frames as shown below. (Following these instructions: link text) This works for static mapping but obviously does not take into account the rotation and vertical position of the laser scanner. The question has 2 parts:
- How do I insert frames (such as the base_stabilized frame) into the tf frames tree
How do setup this frame (for example between base_stabilized) to read data from an IMU. I am using the Pixhawk 4 mini flight controller, which uses QGroundControl to allow data from the PIxhawk to be read. Many Thank for your help.
add a comment

