
Failed to Load mobile_base_controller [closed]

Hi.
I cannot load the differential controllers for my robot. I am having the following message error ( I will use an image because the output of the terminal is too big):
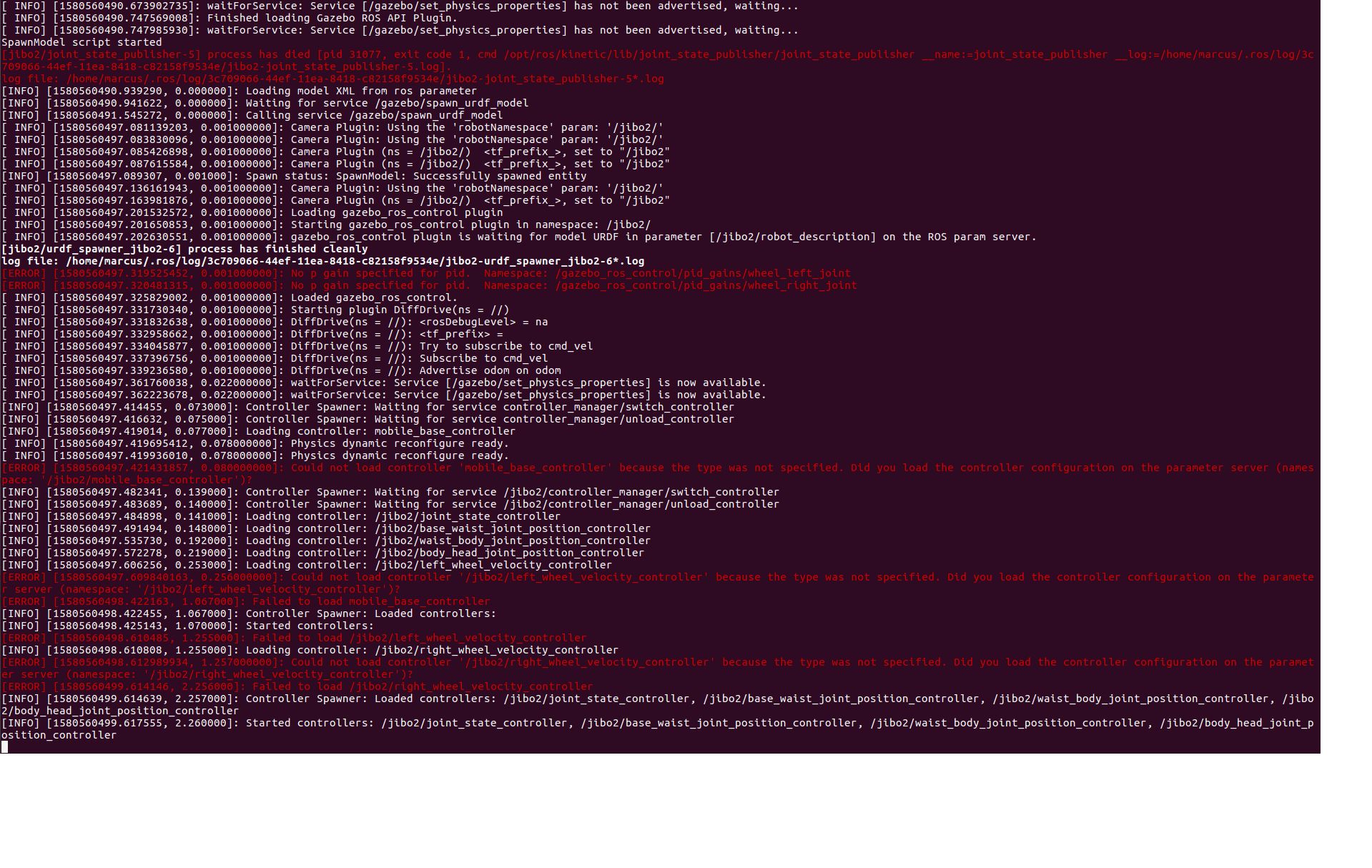
summarizing it: "Could not load controller “mobile_base_controller because…” and: (1)Failed to load mobile_base controller (2) Failed to load jibo2/right_wheel_velocity_controller (3) Failed to load jibo2/left_wheel_velocity_controller
I imagine the error 2 and 3 happens because of the first .yaml (diff-drive type) was not correctly loaded. I tried to load the yaml file without put the name space, out of the group=“jibo2” area…but no success.
I have already seen this video https://www.youtube.com/watch?v=9OWxX... trying to answer this similar question issue https://answers.ros.org/question/2895... but unfortunately for me it did not work.
So My LAUNCH file is below:
<?xml version="1.0" encoding="UTF-8"?>
<launch>
<arg name="urdf_robot_file" default="$(find solution_jibo_description)/urdf/jibo2.urdf"/>
<arg name="x" default="-2"/>
<arg name="y" default="0.0"/>
<arg name="z" default="0.0"/>
<arg name="roll" default="0.1"/>
<arg name="pitch" default="0"/>
<arg name="yaw" default="0"/>
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!-- We resume the logic in empty_world.launch, changing only the name of the world to be launched -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find solution_jibo_gazebo)/worlds/my_world.world"/>
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
<!-- more default -->
</include>
<group ns="jibo2">
<!-- Spawn Part -->
<arg name="robot_name" default="jibo2" />
<node name="jibo2_diff_controller_spawner" pkg="controller_manager" type="spawner" respawn="false"
output="screen" ns="/jibo2" args="mobile_base_controller"/>
<rosparam file="$(find solution_jibo_description)/config/jibo2_controllers.yaml" command="load" ns="/jibo2"/>
<!--
<rosparam file="$(find solution_jibo_description)/config/jibo2_diff_drive.yaml" command="load" ns="/jibo2"/> -->
<param name="/jibo2/robot_description" command="cat $(arg urdf_robot_file)" />
<rosparam file="$(find solution_jibo_description)/config/jibo2_drive_controllers.yaml" command="load" ns="/jibo2"/>
<!-- send fake joint values -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher">
<param name="use_gui" value="TRUE"/>
</node>
<node name="urdf_spawner_jibo2" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -x $(arg x) -y $(arg y) -z $(arg z) -R $(arg roll) -P $(arg pitch) -Y $(arg yaw) -model $(arg robot_name) -param /jibo2/robot_description"/>
<node name="robot_state_publisher_jibo2" pkg="robot_state_publisher" type="robot_state_publisher"
respawn="false" output="screen">
<param name="publish_frequency" type="double" value="5.0" />
</node>
<node name="jibo2_controller_spawner" pkg="controller_manager" type="spawner" respawn="false"
output="screen" args="--namespace=/jibo2
/jibo2/joint_state_controller
/jibo2/base_waist_joint_position_controller
/jibo2/waist_body_joint_position_controller
/jibo2/body_head_joint_position_controller
/jibo2/left_wheel_velocity_controller
/jibo2/right_wheel_velocity_controller">
</node>
</group>
</launch>
MY Config - yaml ...

Isnt diff_drive claiming the wheel_joint resources, the same as velocity_controller?
I will stop asking you to not do this, as it seems you're not willing to follow forum rules.
"is too big" is not a reason to post screenshots.
Please stop doing that.