
Which Mapping and Navigation package should I use for opened Envi.
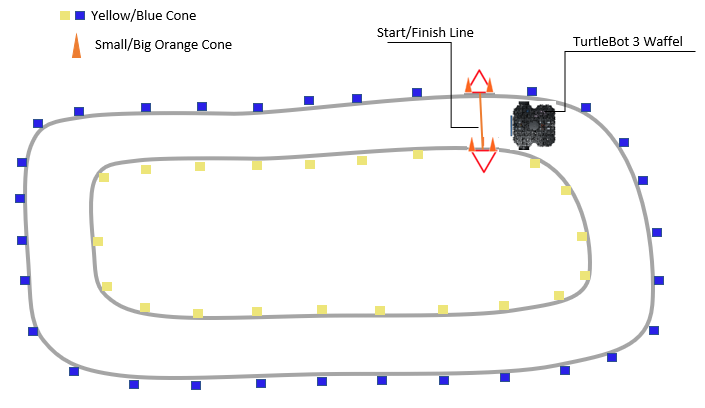
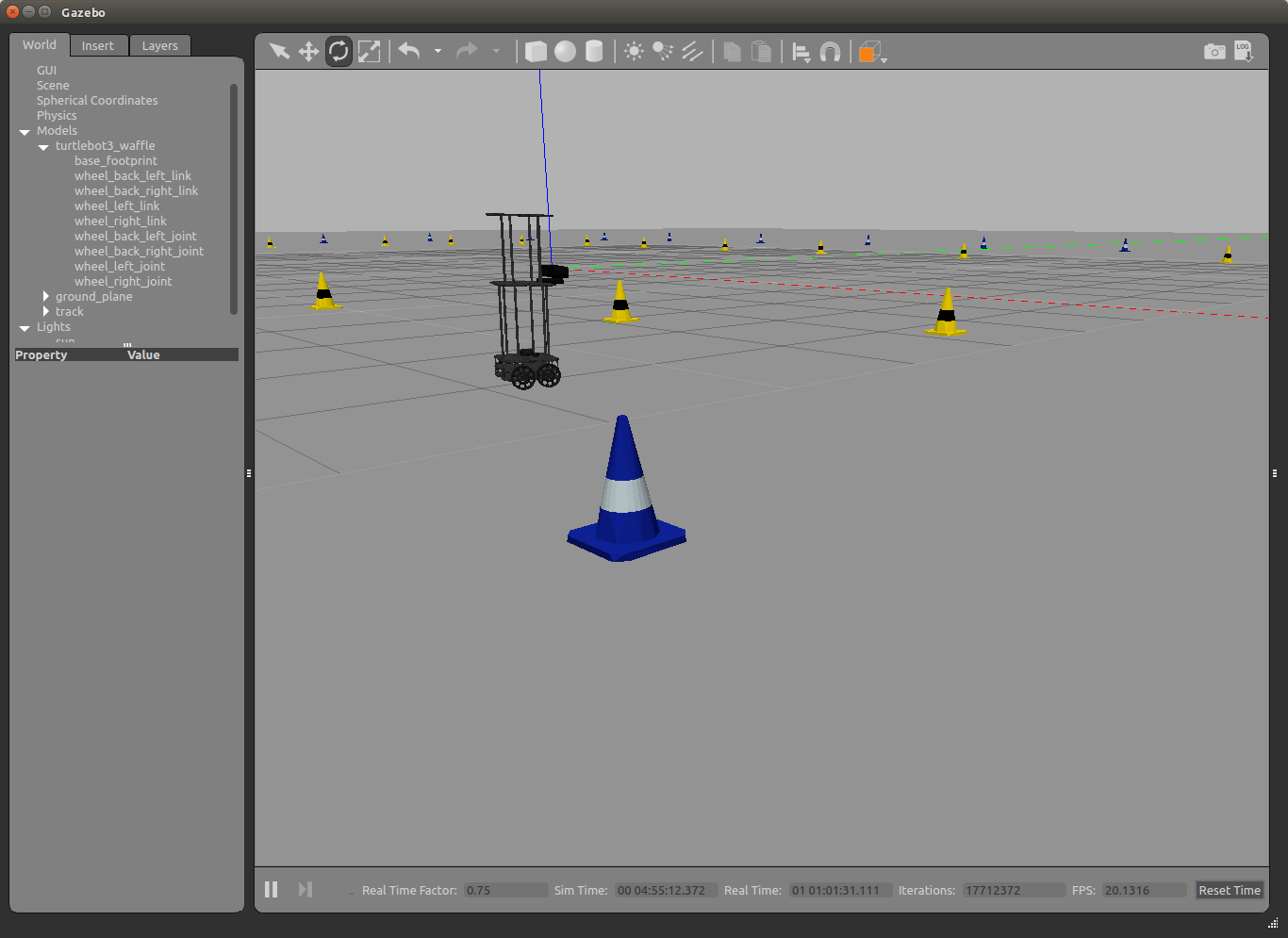
Hello, everybody, I am currently writing my master thesis and the turtlebot is supposed to navigate in an open environment (see picture) autonomous. I do not know which mapping package to use to let the robot navigate between the cones autonomously. the blue and yellow cones define the road and the robot must navigate between them, i.e. it must not move between two blue or two yellow cones.
the hardware: RPlidar A1, Orbbec streo camera, Nvidia jetson nano

The way I would tackle this is by setting waypoints. There are a few waypoint packages out there that will read waypoints from a yaml. I got waypoint_nav working (it had issues with reading yamls and had more stuff than I wanted) so that I create a yaml file that has names waypoints in geometry_msg posestamped and then named trajectories. I pass the yaml files as a param to the node and it uses the first trajectory to pass waypoints to the navigation stack. any of the 3 local_planners should then work ok
How do you use way-points without GPS?is that possible with Odom data ? The Problem is how to localize the robot without to know the position of every cone because the Envi. is changeable