
RTABmap obstacles_detection node does not mark obstacles

Hi,
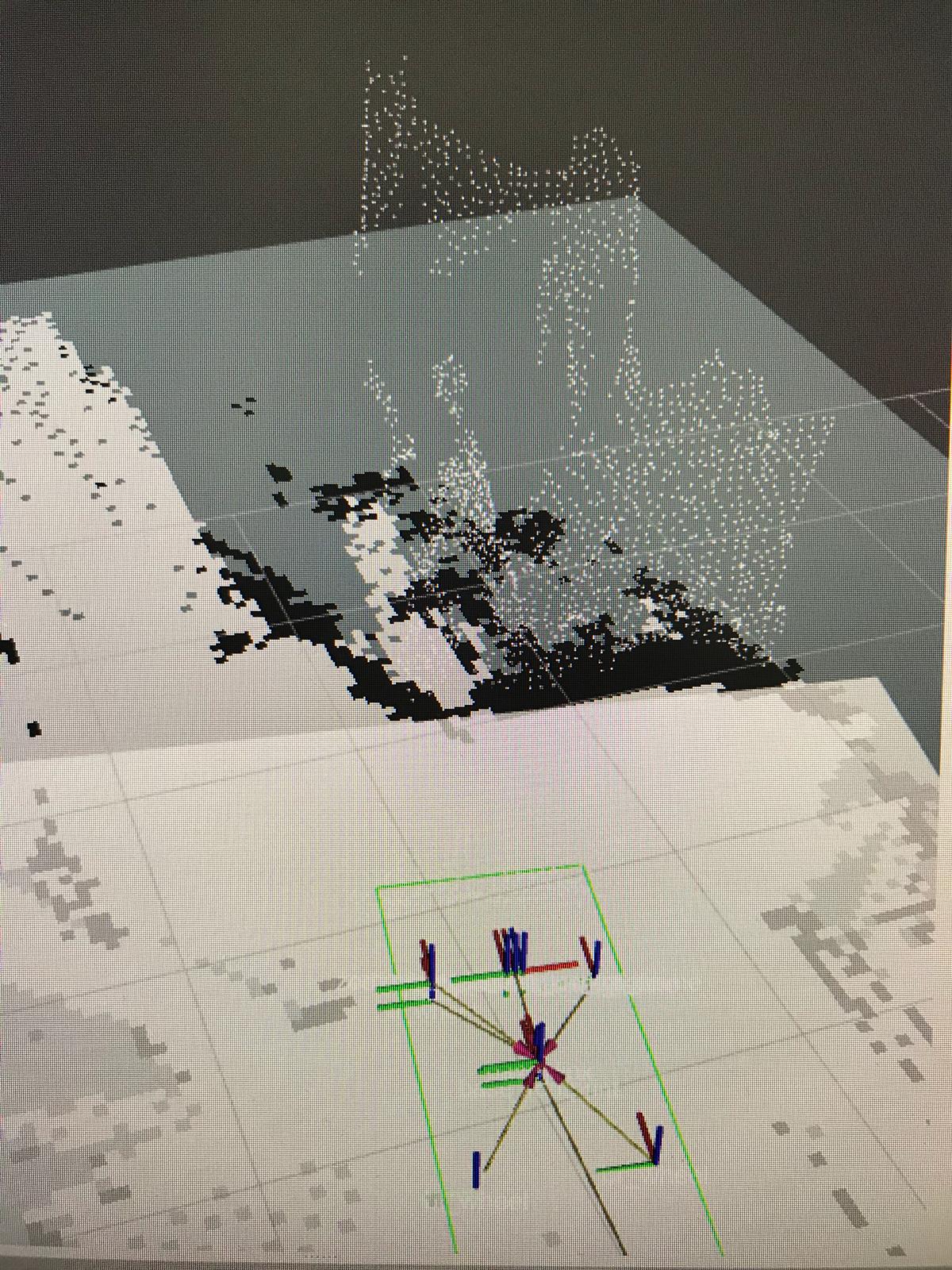
I want to make the rtabmap obstacles_detection node to mark and clear the obstacles on local_costmap however I cannot see that on my local_costmap RViz (even though the obstacles cloud is clearly visible):
Here is my local_costmap config:
local_costmap:
global_frame: odom
robot_base_frame: base_footprint
update_frequency: 2.0
publish_frequency: 2.0
transform_tolerance: 5 # 0.25 seconds of latency, if greater than this, planner will stop
static_map: false
rolling_window: true # Follow robot while navigating
width: 4.0
height: 4.0
origin_x: -5 #-1.5
origin_y: -5 #-1.5
resolution: 0.03
map_type: costmap
plugins:
# - {name: static_layer, type: "costmap_2d::StaticLayer"}
- {name: obstacle_layer, type: "costmap_2d::ObstacleLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
obstacle_layer:
obstacle_range: 0.6
raytrace_range: 0.6
max_obstacle_height: 0.4
track_unknown_space: true
observation_sources: radar_sensorA point_cloud_sensor point_cloud_sensorB
# assuming receiving a cloud from rtabmap_ros/obstacles_detection node
radar_sensorA: {
data_type: LaserScan,
topic: /scan,
expected_update_rate: 0.5,
marking: true,
clearing: true}
point_cloud_sensor: {
sensor_frame: base_footprint,
data_type: PointCloud2,
topic: /planner_cloud,
expected_update_rate: 1.0,
marking: true,
clearing: true,
min_obstacle_height: 0.04,
max_obstacle_height: 99999.0}
point_cloud_sensorB: {
sensor_frame: base_footprint,
data_type: PointCloud2,
topic: /ground,
expected_update_rate: 1.0,
marking: true,
clearing: true,
min_obstacle_height: -1.0}
What could be the reason?
Also, what if I will use pointcloud_to_laserscan package and use the laser scan as an obstacle detector?

what is your
rqt_graph? are topics correctly linked to move_base? It is also possible to use pointcloud_to_laserscan, which can save you some computation time, though less safe if you need to track 3D obstacles.