
Static Publisher Z argument not working

I am trying to establish a link between my camera and the calibration pattern on the workstation. I've got the correct X,Y,Z by hand measurements, and I now want to do the same for the rotation. I figured out everything except the Z value, which is somehow not showing me correct behavior.
rosrun tf static_transform_publisher 0.019 0.393 0.65 4.71239 1.5708 0.0 world camera_link 1000
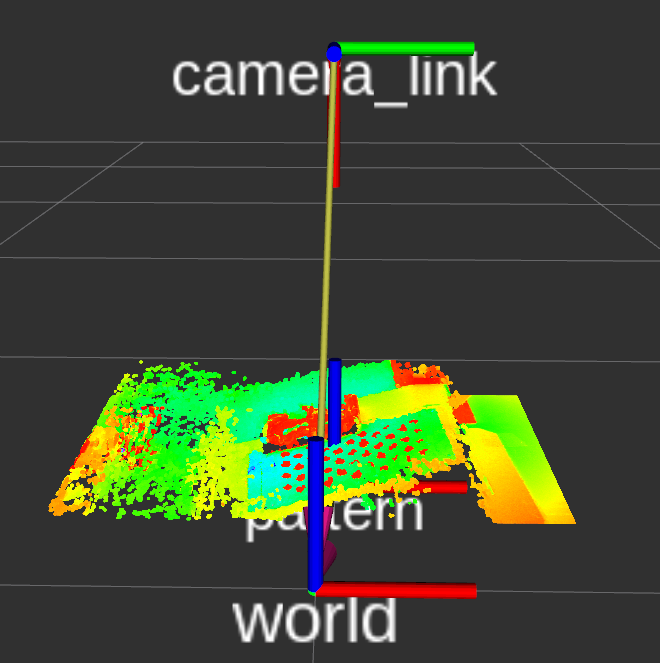
gives the above setup, which requires a bit of rotation around the Z (blue) axis, so that the pattern's Z can correspond to the first circle (right-top) of the pattern, since this is the reference point I want to base it on.
However, even a slight bit of change in the Z value results in a rotation on the totally different axis, which is quite nonsensical. Check out the new command with a bit of shift in the Z value:
rosrun tf static_transform_publisher 0.019 0.393 0.65 4.71239 1.5708 0.6 world camera_link 1000
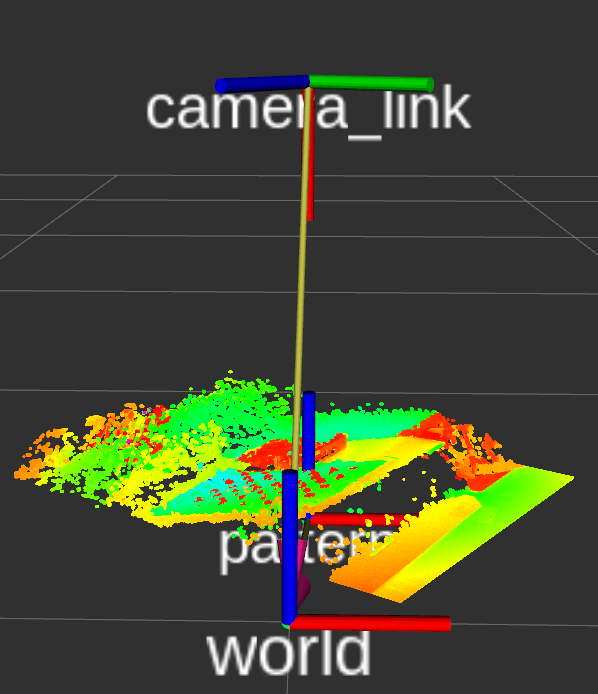
which rotated around the wrong axis, since this is definitely not around the blue (Z) axis, but rather the red (X).
What's going on?
EDIT: There was a typo in the second command.

