For example, I want to get this module (message_filters), how can I do that?
Released packages
In general, if possible, you should always prefer to use apt or apt-get on Ubuntu (and Debian).
Installing packages using the binaries provided through the ROS buildfarm is the most efficient way, as it automatically takes care of things like resolving dependencies (ie: it installs everything needed to be able to use a package).
For your specific package, you would run something like this in a command shell:
# this should be run every now and then
sudo apt update
# this actually installs the package
sudo apt install ros-kinetic-message-filters
After following the on-screen prompts, apt should install the package and you can immediately start using it.
There are a number of ways to see whether a package has been released:
use the ROS wiki: a released package for which a wiki page exists has a number of buttons at the top of the page. For message_filters we see:
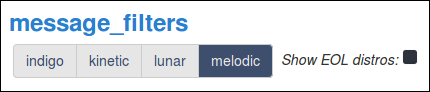
Notice the indigo, kinetic, lunar and melodic buttons. Clicking on those will switch the wiki page to the version specific to that particular ROS release. Upon clicking on those buttons, a number of badges will appear/disappear just below the Package Summary heading:
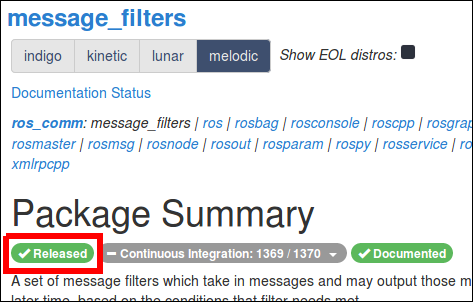
Notice the Released, Continuous Integration and Documented badges here again for message_filters.
The important one here is Released. This badge being shown tells us that message_filters has been released into ROS Melodic and should be available for installation using apt.
use the ROS Index. Similar to the ROS wiki, this will list packages which have been registered with the ros/rosdistro repository. Search the available packages using the search box in the top right of the page.
use the status pages: these pages can be found here: repositories.ros.org/status_page and are periodically updated by the ROS buildfarm. Even if a package does not have a wiki page (they have to be created by a human), a released package will show up on these pages.
For ROS Kinetic, we would open the ros_kinetic_default.html page (refer to #q301220 for why there are multiple Kinetic pages) and search for message_filters by typing it in the textfield at the top-left of the page.
If a package has been released through the ROS buildfarm, the page should show you one or more rows after having filtered everything based on your query. Released packages will show up. If the page is empty, a package is not released. Refer to the legend (coloured squares, top of the page) for an explanation of the meaning of the coloured squares in the rightmost columns.
No release available
If a package is not available, the next option is to try and build the package "from sources". This essentially means that you'll try to compile it on your own machine in a Catkin workspace.
<personal_opinion_based_on_years_of_experience>
Do not do this, unless absolutely necessary.
</personal_opinion_based_on_years_of_experience>
There are only a few reasons to attempt a build from source:
- there are no binaries available ...
(more)

@Yehor: I've updated the title of your question, as "module" is terminology that is used in Python development. Your question appears to be about ROS packages (which, when they are written in Python, could also contain modules).