
Multiple masters publishing, one listener subscribing
I have a ROS-kinetic system with many robots, each operating under their own ROS master as they need to be able to act independently.
I want to build a Widget that can listen to each robot master's published topics (say /position) so it can synthesize a result that it can publish which will then be subscribed to by a single robot (say /synthesis).
I made a drawing:
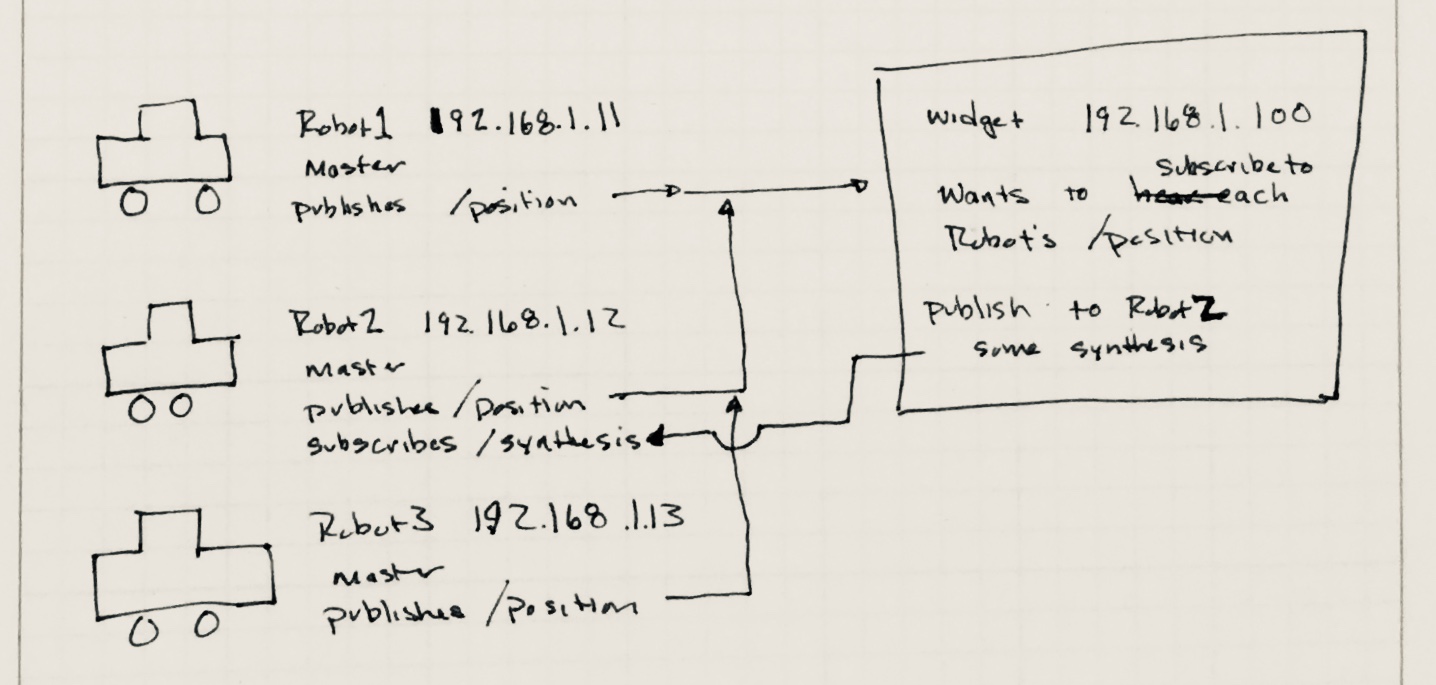
The ROS networking is working fine but, how do I get data collected at my Widget?
I looked at multimaster_fkie, topic_proxy, and rocon_gateway but I don't have full access over the robots so installing things there may get difficult. The foreign_relay package seemed good but it isn't supported in kinetic and I'm the sort to worry about those sorts of things.
I think I can echo each position to a bag via:
export ROS_MASTER_URI=http://robot1:11311
rostopic echo -b robot1_position.bag /position &
export ROS_MASTER_URI=http://robot2:11311
rostopic echo -b robot2_positio.bag /position &
I could then read the bag, do what I need to do and publish to the robot getting the bonus information. However, involving bags seems messy (and likely adds latency to my system). I'm using rospy to generate the /synthesis.
I was hoping topic_tools relay would do this but I couldn't figure out how.
Any advice, better ideas, or (even better) an easy package that would do this for me?

You should be able to build foreign_relay from source on kinetic; the APIs that it uses haven't changed.
foreign_Relay works fine on kinetic, I have tried it on kinetic .Just check if you have updated /etc/hosts file with the ip's.it should work.