
Error while running pointcloud2 in RViz

I've tried visualizing 3D LiDAR( CE30-C Benewake solid state LiDAR) point cloud data in RViz. Terminal Commands used:
- To run the LiDAR, in Catkin workspace,
$ rosrun ce30c_driver ce30_cloud
- Set the source frame, target frame and time period in milliseconds
$ rosrun tf static_transform_publisher 0 0 0 0 0 0 ce30c_output map 100
- Opened RViz
$ rosrun rviz rviz
- Tried by setting the fixed frame to map and ce30c_output, one at once in two trials by closing and opening rviz in each of these two trials.
Incurred error in both the cases: 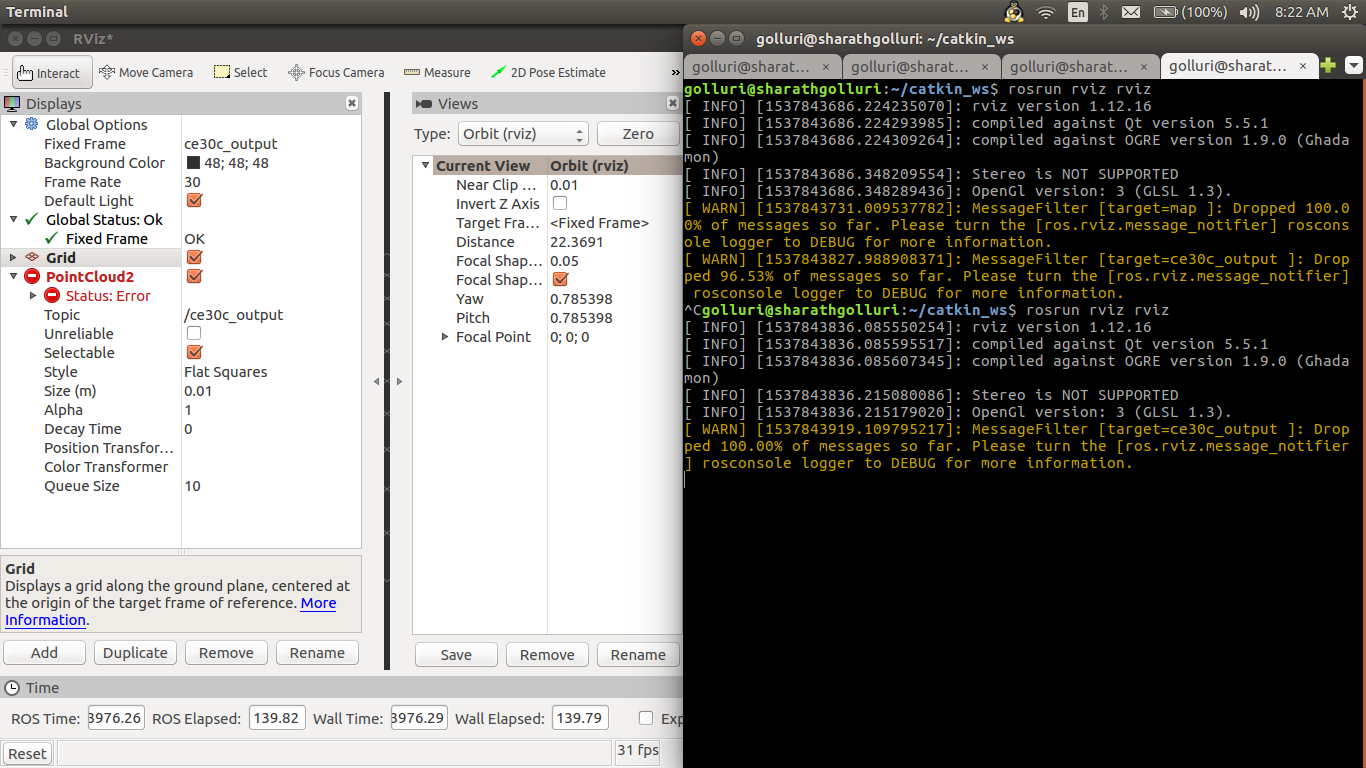
this is the image with the fixed frame as ce30c_output
Specifications: ROS kinetic. Ubuntu 16.04 LTS.
Where am I going wrong here? or what am I missing here?
Someone, please help me with this.
Thanks in advance.
add a comment
