
using gmapping output in stage simulations [closed]

Hi,
I had generated a map using gmapping. I want to use this in stage. On just replacing file name, stage gets the file input. The output is shown in
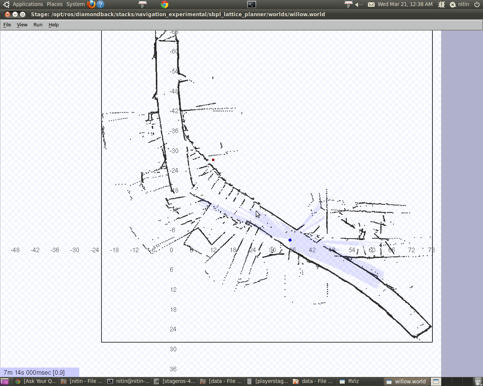
Corresponding to this, rviz visulation is shown below:
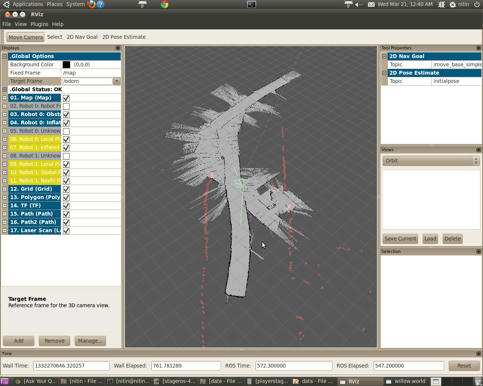
There are differences in size of map simulated by stage and actual map image. Laser readings are quite far away from boundries in rviz. Why is this happening??
I am not able to do any path planning because origin of sensor is out of map bounds.
[ WARN] [1332270202.853848153, 171.200000000]: The origin for the sensor at (44.77, 54.27, 0.15) is out of map bounds. So, the costmap cannot raytrace for it and solution is not found.
Thanks for help. prince

Prince, DId you calibrate your turtlebot properly and set both the parameters resulted by calibration??
Actually this was done using pioneerAT+ tilted SickLMS, About caliberation there is nothing much to do with it. I still need to experiment with horizontal Sick Laser mount.