
Can't turn around Jackal robot while using teb_local_planner
Hello,
I'm a student and I want to use teb_local_planner to my Jackal robot. But while I setup it into Jackal, I have some trouble.
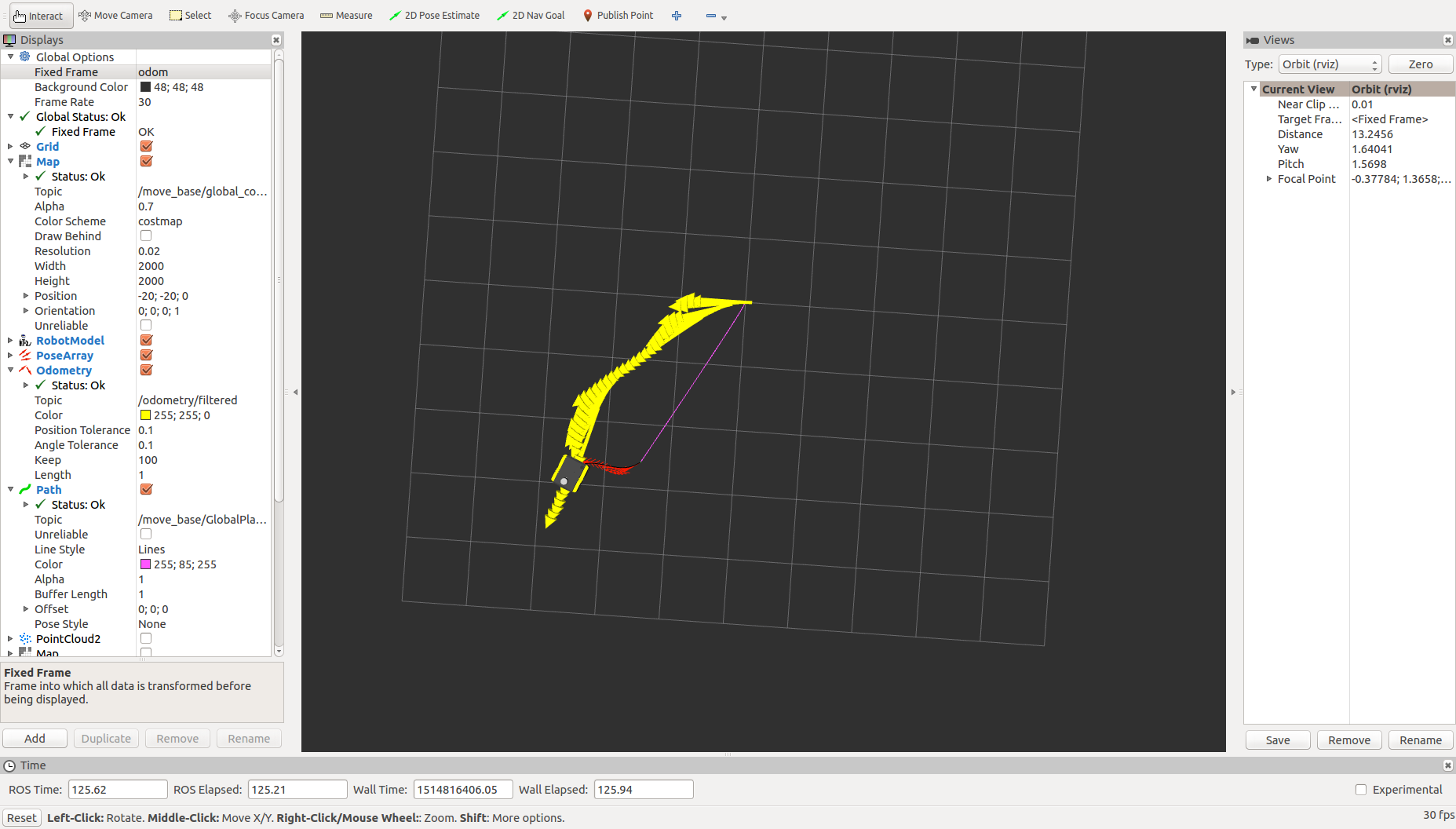
It just could move forward, it can't turn around(Like the Figure). And it doesn't move in narrow corridors.
I don't know how to solve it. Could you please give me some suggestions?
Thank you very much!

What have you tried so far?
I just setup it according to teb_local_planner tutorials .
I am trying to do something similar, have you solved this issue?