
Is this amcl pose with covariance good? I barely added any parameters. How can I make my attempt more challenging?

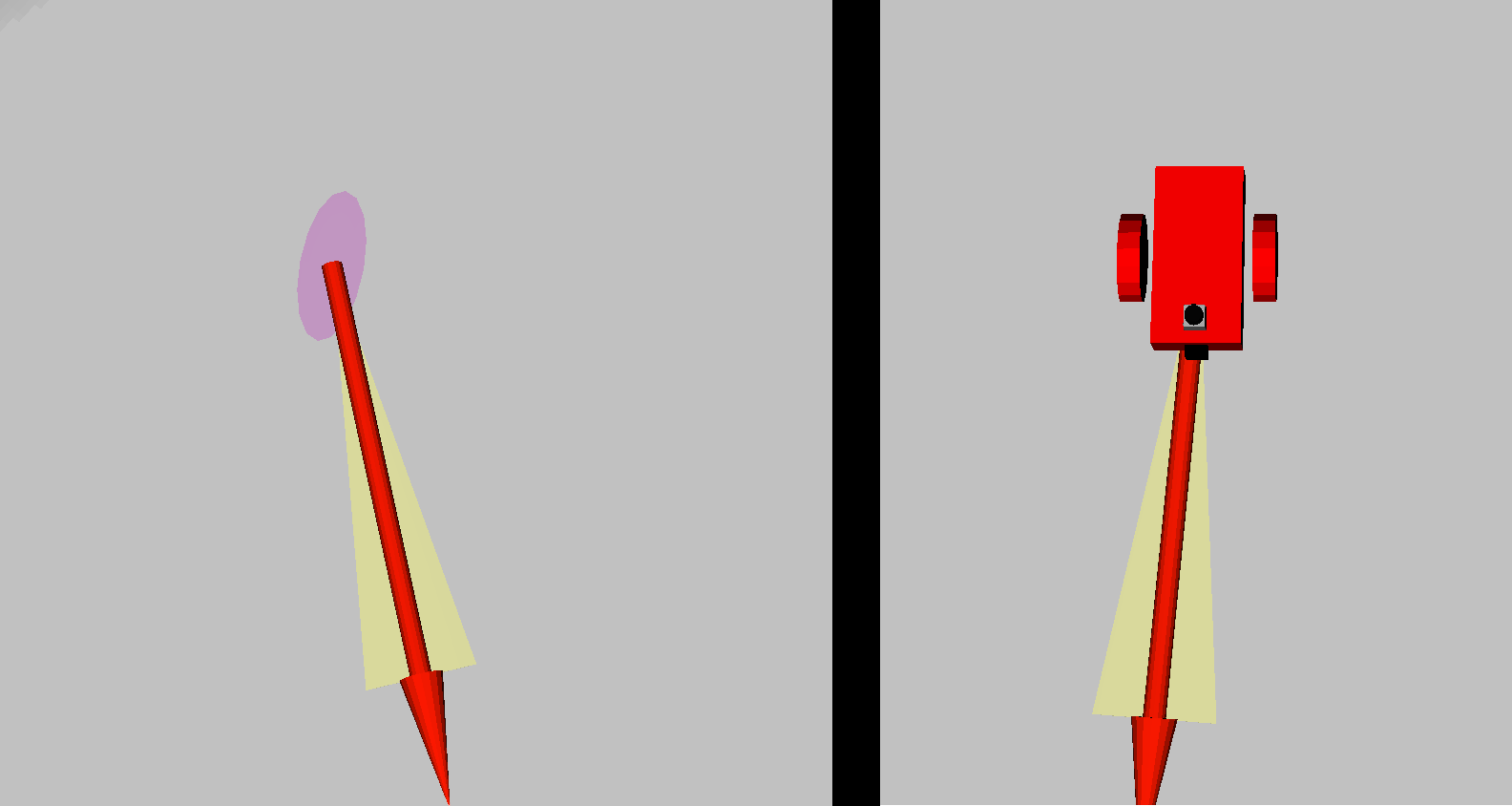
The above seems to be good. The ellipse/circle remains small and the arrow doesn't show too large a range.
But the weird part is that I didn't add any parameters to the amcl node.
So the default parameter values do such a good job?
What can I do to challenge my robot simulation such that I can tune different parameter values and gradually observe the results?
I don't like that I get good results without doing much work here.
add a comment
