
map, odom, robot footprint are not aligned in RViz

Hello,
I have a custom robot which I am trying to localize using amcl. I am using a map from clearpath. I face a very weird issue with the robot when simulating it in rviz.
- The robot model "cuts across" the map.
- The "odom" frame is underneath the "map" and the "robot_footprint" frames.
- At times the "robot_footprint" frame fluctuates in respect to the "odom" or "map" frames.
Here are the images to denote the above (please ignore my awful paint skills)
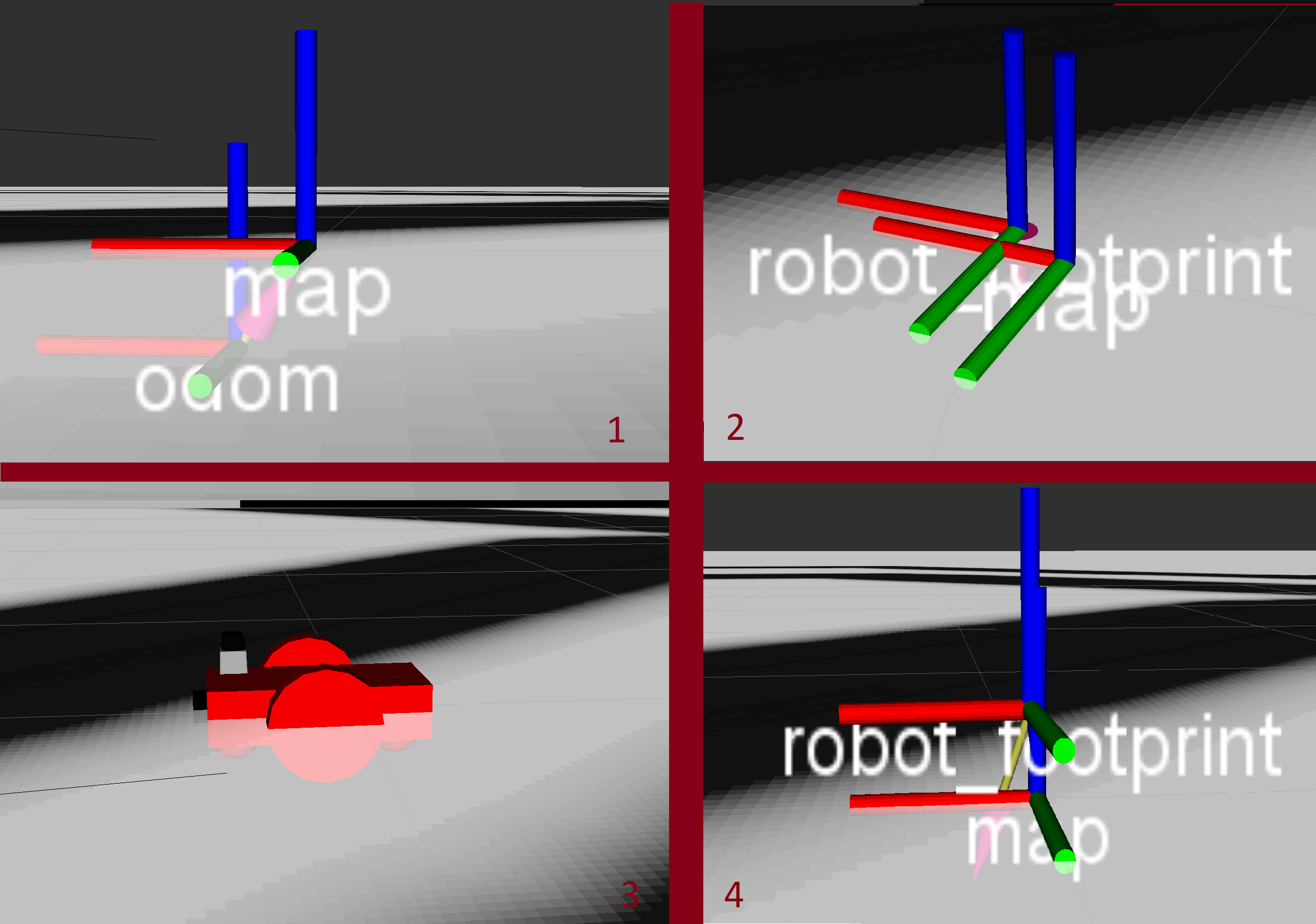
As you can see,
- shows "odom" underneath "map" frame.
- shows "robot_footprint" and "map" on the same plane (plane is the global costmap).
- shows the robot model "cutting" across the map.
- shows "robot_footprint" fluctuating/flickering with respect to "map"/"odom".
I am not entirely sure how to fix this.
The above are when "map" is selected as "Fixed Frame" in "Global Options".
Here are some configuration details -
Part of URDF
<link name="robot_footprint"></link> <joint name="robot_footprint_joint" type="fixed"> <origin xyz="0 0 0" rpy="0 0 0" /> <parent link="robot_footprint"/> <child link="chassis" /> </joint> <link name='chassis'> <pose>0 0 0.1 0 0 0</pose> <inertial> <mass value="15.0"/> <origin xyz="0.0 0 0.1" rpy=" 0 0 0"/> <inertia ixx="0.1" ixy="0" ixz="0" iyy="0.1" iyz="0" izz="0.1" /> </inertial> <collision name='collision'> <geometry> <box size=".4 .2 .1"/> </geometry> </collision> <visual name='chassis_visual'> <origin xyz="0 0 0" rpy=" 0 0 0"/> <geometry> <box size=".4 .2 .1"/> </geometry> </visual>
costmap_common_params.yaml
map_type: costmap
origin_z: 0.0
z_resolution: 1
z_voxels: 2
obstacle_range: 2.5
raytrace_range: 3.0
publish_voxel_map: false
transform_tolerance: 0.5
meter_scoring: true
robot_radius: 0.3
inflation_radius: .6
observation_sources: laser_scan_sensor
laser_scan_sensor: {sensor_frame: hokuyo, data_type: LaserScan, topic: /robot/laser/scan, marking: true, clearing: true}
global_costmap_params.yaml
global_costmap:
global_frame: map
robot_base_frame: chassis
update_frequency: 10.0
publish_frequency: 5.0
width: 40.0
height: 40.0
resolution: 0.05
origin_x: -20.0
origin_y: -20.0
static_map: true
rolling_window: false
local_costmap_params.yaml
local_costmap:
global_frame: map
robot_base_frame: chassis
update_frequency: 10.0
publish_frequency: 5.0
width: 10.0
height: 10.0
resolution: 0.05
static_map: false
rolling_window: true
Any help is appreciated, thank you!

Any Updates on this?