
error and warning with urg_node

Hi,
I'm trying to use rtabmap_ros for a RGB-D + 2D LIDAR setup
My problem is that I'm facing issues when launching the LIDAR (rtabmap_ros needs a /scan topic to generate an odometry thanks to hector_mapping) using:
rosrun urg_node urg_node
I'm getting errors and warnings similar to this ROS Q&A post and this urg_node github issue:
turtlebot@turtlebot-14:~/erl/logs_new$ rosrun urg_node urg_node
[ INFO] [1501672389.076895460]: Connected to serial device with intensity and ID: 00904000
[ INFO] [1501672389.316425143]: Streaming data.
[ WARN] [1501672693.030247256]: Could not grab single echo scan.
[ERROR] [1501672694.629443024]: Error count exceeded limit, reconnecting.
[ INFO] [1501672697.891357317]: Connected to serial device with intensity and ID: 00904000
[ERROR] [1501672698.115464437]: Tried to advertise a service that is already advertised in this node
[/urg_node/set_parameters]
[ INFO] [1501672698.133888978]: Streaming data.
[ WARN] [1501672719.542528721]: Could not grab single echo scan.
[ERROR] [1501672721.140534345]: Error count exceeded limit, reconnecting.
[ INFO] [1501672724.400141552]: Connected to serial device with intensity and ID: 00904000
[ INFO] [1501672724.642714834]: Streaming data.
[ WARN] [1501672783.902779794]: Could not grab single echo scan.
[ERROR] [1501672785.514714235]: Error count exceeded limit, reconnecting.
[ INFO] [1501672788.793858907]: Connected to serial device with intensity and ID: 00904000
[ERROR] [1501672789.019156660]: Tried to advertise a service that is already advertised in this node
[/urg_node/set_parameters]
[ INFO] [1501672789.034051716]: Streaming data.
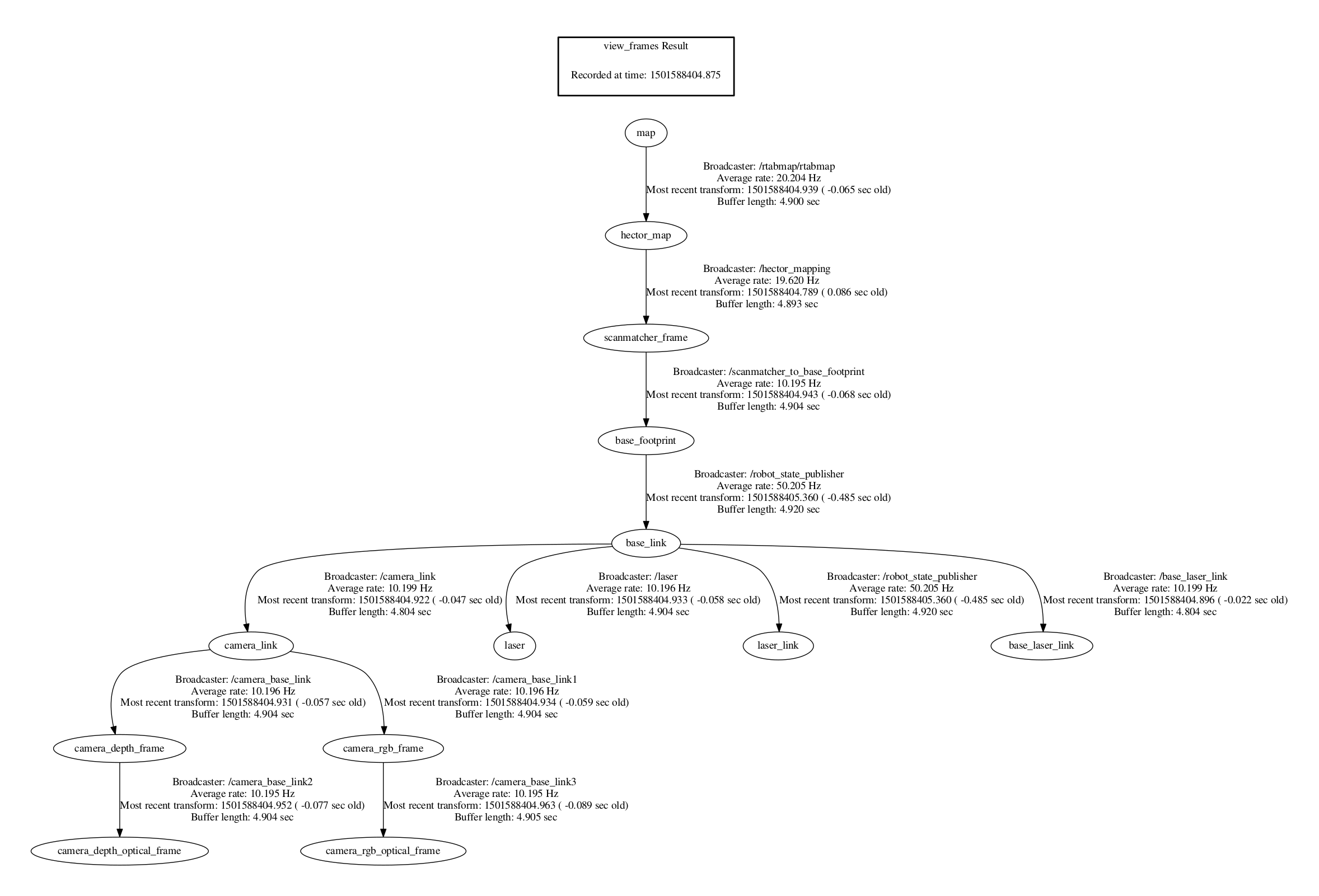
I'm wondering whether it could have something to do with the publishing frequencies. Here is my
view_frames
result (tf tree):
FYI, I tried this possible solution - launching as sudo, but got stuck in the compilation part, which I don't really understand (hence my recent comment at the end ! - I reinstalled the node to go back in the procedure)
Thanks !
add a comment
