
Saving odometry data:Conversion into "txt" / "CSV"
I want to get the raw odometry data from the Rviz. Consider the following example i have implemented from one of the ROS Books in which the bot is supposed to move from one position to another and then come back to the starting point.
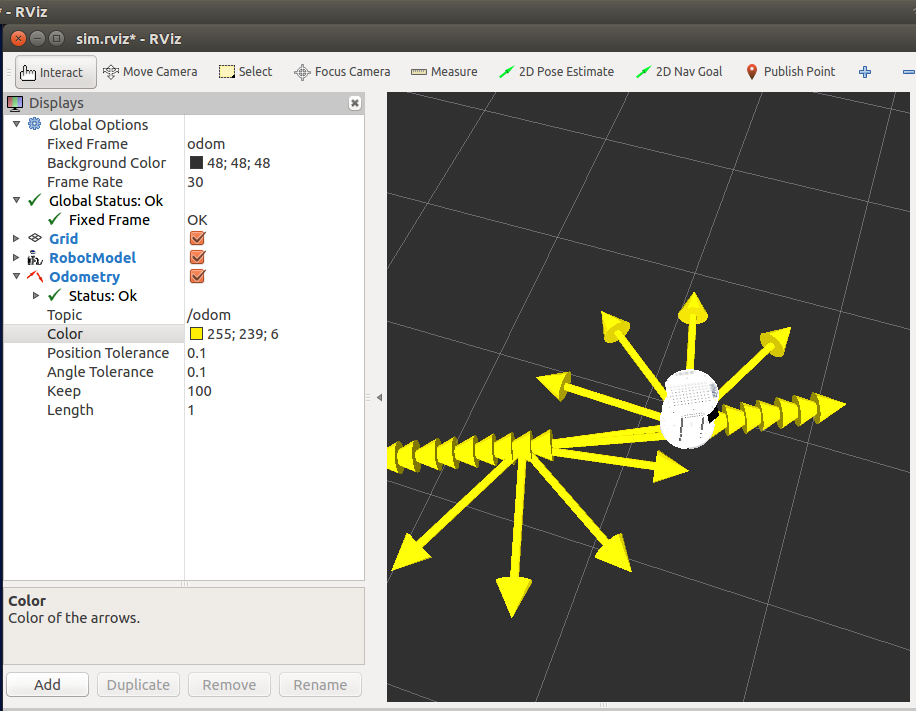
As shown in the output, the arrows represents the odom data. I want to view this odom data in a file including the complete raw data of odom in text form of the whole process. I want to view the data the Rviz is planning at each instant of time. Is it feasible with ROS?? I tried the rosbag concept, but playing the generated bag file is not giving me the desired output.
<update> Using ( http://answers.ros.org/question/9102/... , I tried the "rostopic echo -b file.bag -p /topic > data.txt" but I am getting a blank txt file " and i am not able to observe any output with the command "rostopic echo -b file.bag -p /topic.</update>
On using the "rqt" command to check the data of the bag file, then i got the following output.
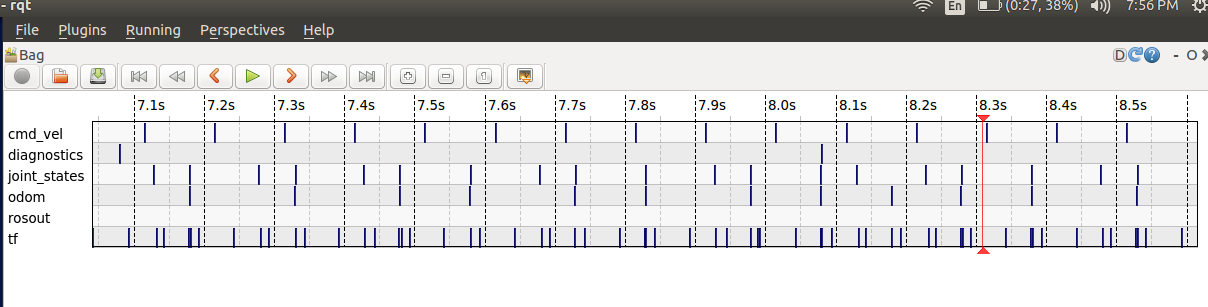 This means that the bag file has the data, but then why am i getting a blank ".txt" file?? Also, how to understand the data the "rqt" is showing??
Also, why am i not able to get "csv" file?
Note: (Update from the suggested given answer) Using "rostopic echo /odom" is giving an appropriate change of odom values. But i want a user understandable set of odom values.
This means that the bag file has the data, but then why am i getting a blank ".txt" file?? Also, how to understand the data the "rqt" is showing??
Also, why am i not able to get "csv" file?
Note: (Update from the suggested given answer) Using "rostopic echo /odom" is giving an appropriate change of odom values. But i want a user understandable set of odom values.

