
Rviz running on Gazebo simulation issue. [closed]
I am following the book "Mastering ROS for robotic programming" and is currently working on Gazebo simulation. I have obtained the 3d visualization of the :robotic arm" but when i view the point cloud data of this sensor in RViz using the following command: $ rosrun rviz rviz -f /rgbd_camera_optical_frame
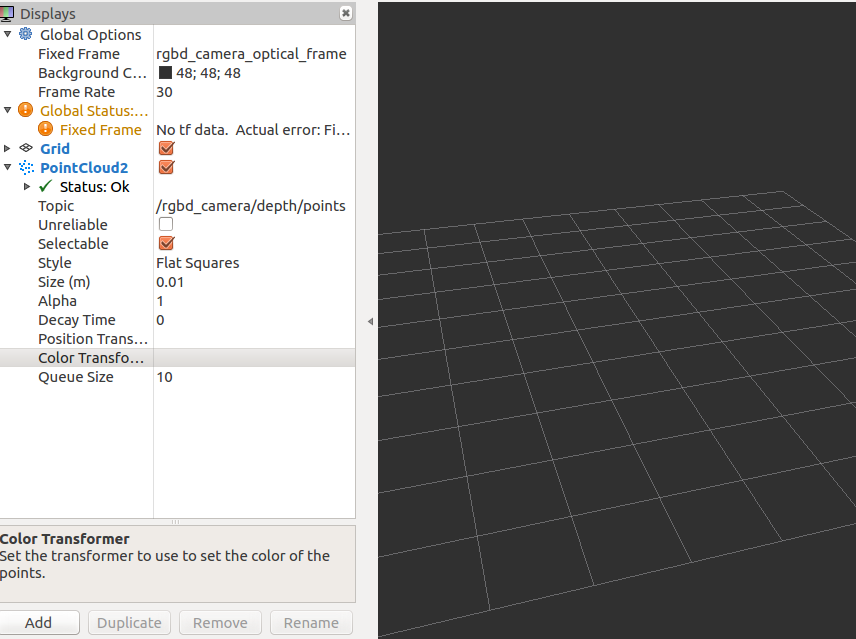
then there is no output obtained. Following the following instructions from the book, "Add a PointCloud2 display type and Topic as /rgbd_camera/depth/points . Set the Color Transformer option as RGB8 ."
I am not able to get any option on the "color transformation tab" and it seems to be disabled.
Also ,when i am using the following commands to view Gazebo 3D vision sensor, • View the RGB raw image: $ rosrun image_view image_view image:=/rgbd_camera/rgb/image_raw • View the IR raw image: $ rosrun image_view image_view image:=/rgbd_camera/ir/image_raw • View the depth image: $ rosrun image_view image_view image:=/rgbd_camera/depth/image_raw, my output is not responding and is having hang problems. NOTE:I am avoiding the hang issue as it might be my system problems.
Thank you in advance. Regards

Check the warning in "Global Status/ Fixed Frame" it seems that you do not publish the tranform from
rgbd_camera_optical_frameto your base frame, It could explain why you cannot see anything. Are you using a transform publisher ?Sorry but that is not working. This warning remains intact even after running the following code: $ rosrun tf static_transform_publisher 0 0 0 0 0 0 1 map my_frame 10 But i dont feel this is the issue, because the output image given in the book also has the same warning.