
How to subscribe to a topic whom type is gazebo_msg/ContactState
Hi everybody
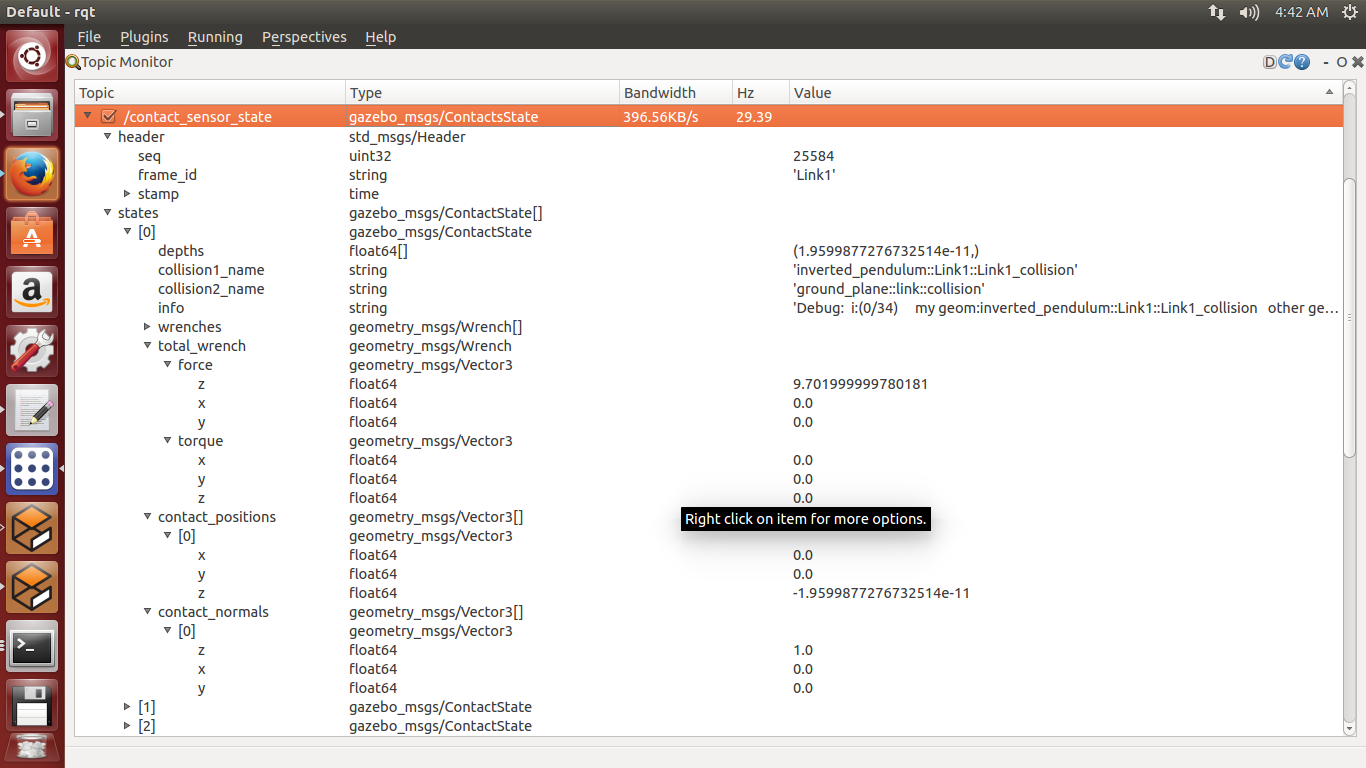
I'm trying to write a subscriber following this tutorial) to listen to a topic which is published by a contact sensor (libgazebo_ros_bumper.so). Here is the structure of this topic shown in "topic monitor":
Assuming that we want to write the size of ContactState message published by this topic, I wrote this program and compiled it (using catkin_make command) successfully:
#include "ros/ros.h"
#include "std_msgs/String.h"
#include "gazebo_msgs/ContactState.h"
#include <sstream>
void chatterCallback(const gazebo_msgs::ContactState cs)
{
int a;
a = sizeof(cs);
std::stringstream ss;
ss << a;
ROS_INFO("The size of recieved ContactState message is: %d", a);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "listener");
ros::NodeHandle n;
ros::Subscriber sub = n.subscribe("contact_sensor_state", 1000, chatterCallback);
ros::spin();
return 0;
}
However, Nothing happen whenever I run this subscriber node using rosrun command. It seems that ROS never call chatterCallback function. How should I edit ros::Subscriber sub = n.subscribe("contact_sensor_state", 1000, chatterCallback); to fix this issue?
I also have 2 more simple question regarding the above question:
1) How can I store the valued published by "contact_sensor_state/states/[0]/total_wrench/force/z" in a double variable in my program? (Shay answered this question)
2) Is it possible to advertise a variable in my program? I mean is it possible for a node to be both a subscriber and publisher. If yes, how should I edit the code to do this? (Shay answered this question)
I'm using ROS indigo, gazebo 2.2 and ubuntu 14.04.
Thanks

