
MoveIt demo.launch error
Hi,
I have used the setup assistant of MoveIt to create the config package and it worked fine. But when I launched the demo.launch file, I got the following error :
...
auto-starting new master
process[master]: started with pid [43949]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to eb76e8ea-711b-11e6-8339-480fcf447f3c
process[rosout-1]: started with pid [43963]
started core service [/rosout]
process[joint_state_publisher-2]: started with pid [43980]
process[robot_state_publisher-3]: started with pid [43981]
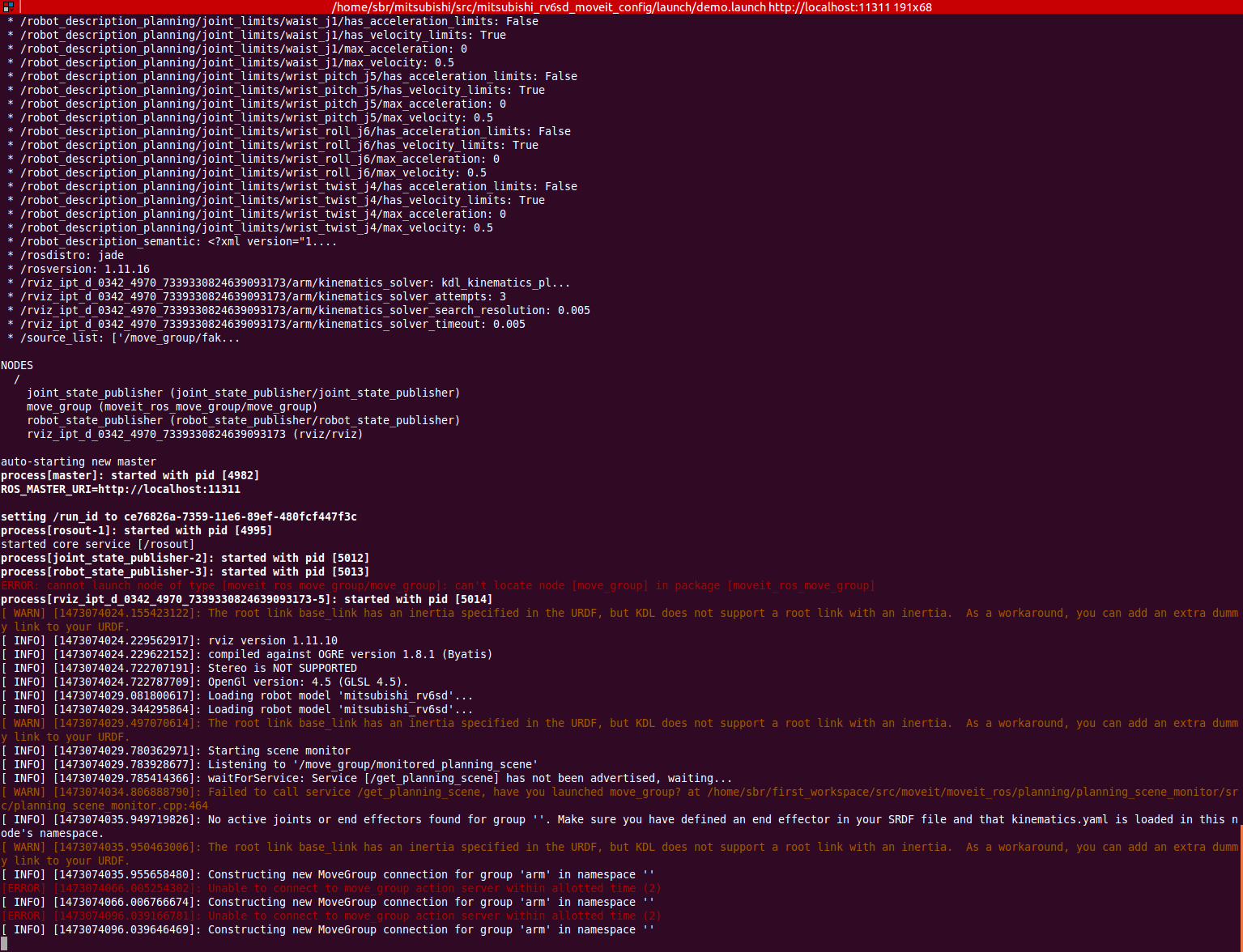
ERROR: cannot launch node of type [moveit_ros_move_group/move_group]: can't locate node [move_group] in package
[moveit_ros_move_group]
process[rviz_ipt_d_0342_43937_3307353756922455826-5]: started with pid [43982]
[ WARN] [1472827541.765044325]: The root link base_link has an inertia specified in the URDF, but KDL does not
support a root link with an inertia. As a workaround, you can add an extra dummy link to your URDF.
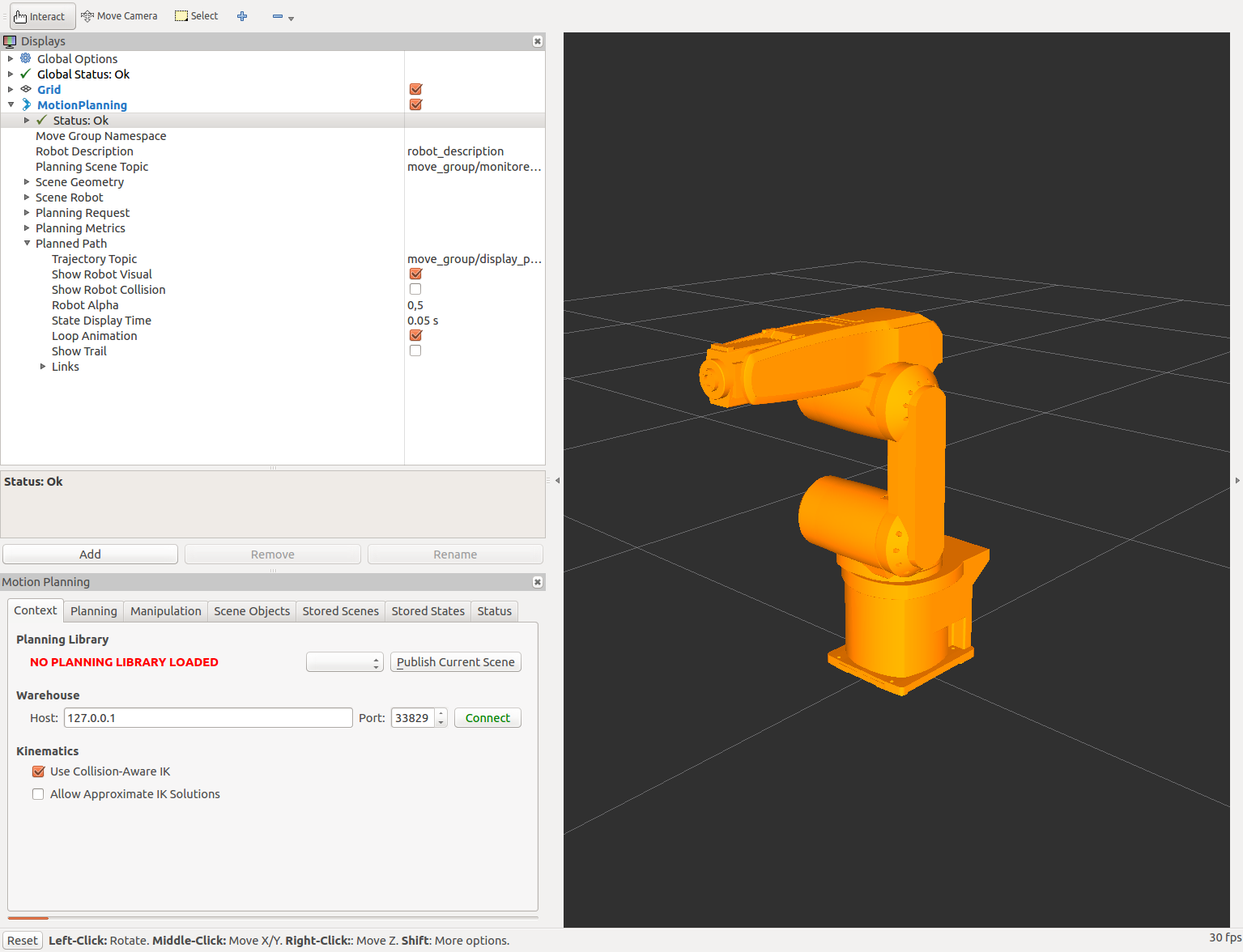
The URDF works perfectly fine with RViZ and Joint State Publisher GUI sliders (without MoveIt) and after a while I get the interactive markers in RViZ (with MoveIt) and I am able to move the arm around but it says 'No Planning Library Loaded'. Also system dependencies seem to be satisfied. I'm unable to find out what the exact issue is.
EDIT :
I did binary installation of the MoveIt for Jade. I used this link to install MoveIt. Then I launched the setup assistant and created the config package following this video.
Here are the screenshots of RViz and Terminal after launching demo.launch :


If this is the output right after you've used the Setup Assistant (ie: you haven't changed anything in the generated launch files), could you please report this at the MoveIt issue tracker? Please mention how you installed MoveIt, and what happened.
Issue: ros-planning/moveit#200.
@gvdhoorn I have reported this issue to the MoveIt Issue Tracker. I have mentioned there about the steps that I followed. I'll edit the question here as well.
I am facing similar error. Can anyone help me?
No. Not without more information.