
Camera Pose realization
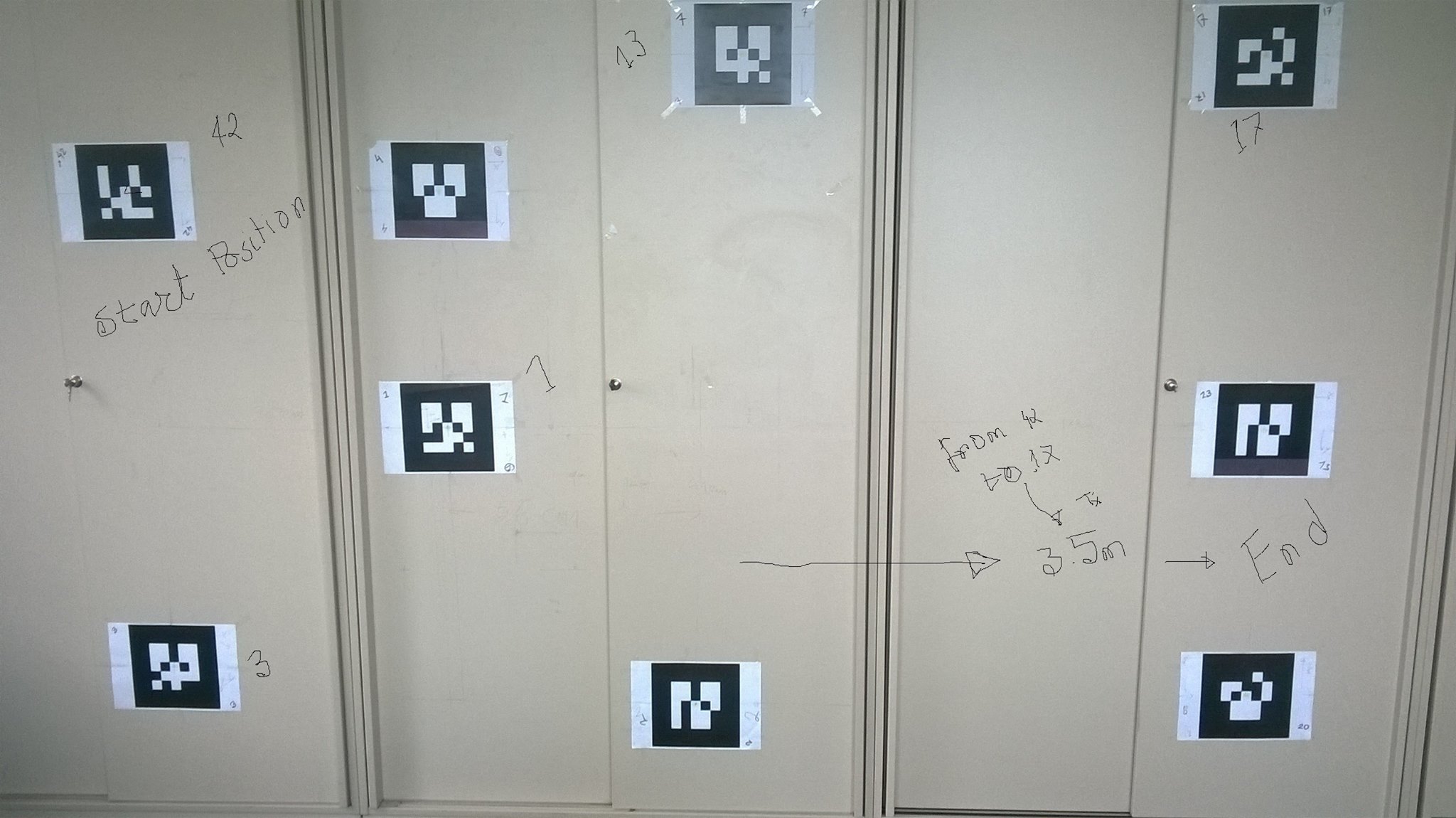
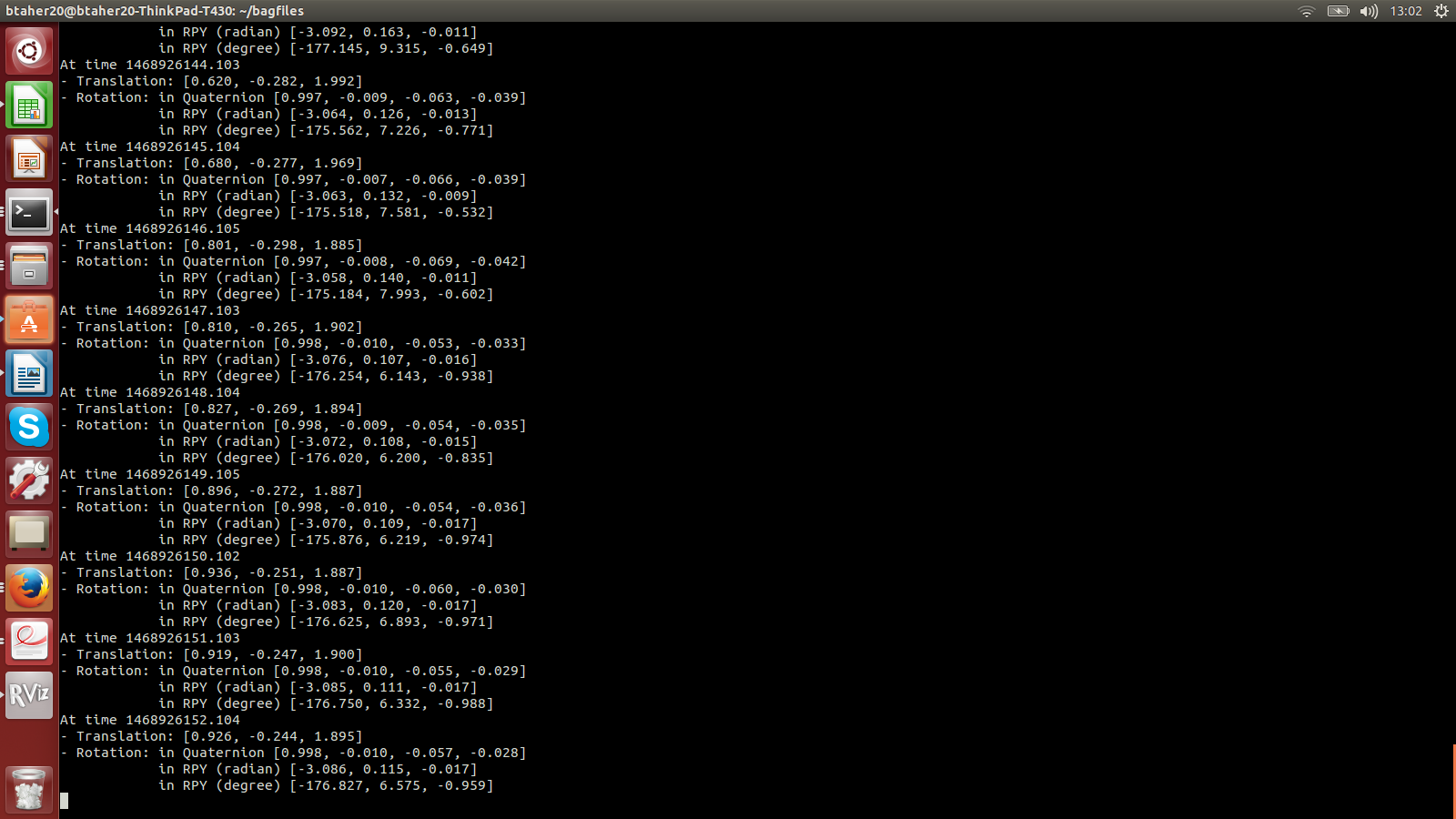
Hi All I am Using ROS_indigo for Tracking marker based camera pose.I get TF values with given(in Rviz like I give fix frame marker_42,Ref Frame Marker _42) and I am getting my camera pose when moving my Camera.This works upto FOC of camera around 1 meter.I want to any body inform me how can I use this Rviz to track all markers while fixing may be 42. I am giving screen short.
by fixing marker_42 as ( 0,0,0) position for camera ,I want to get position of my camera pose upto marker_17 .How Can I do that.I am using TF but that does not work. rosrun tf tf_echo /ar_marker_42 /camera.I get by using my configuration
gives me 98 cm in x direction tracking as I am interest in x+ direction moving. How can I get Pose upto Marker_17.Could any body give any hinds.
Thanks in advance.
Best Taher

{kind=link}
{kind=link}
You screen shot isn't visible.