
static_map and dynamic obstacles
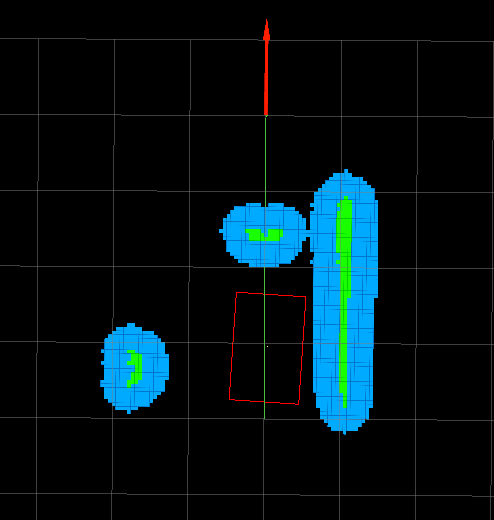
hello. I control my robot with DWA planner. I need to use " static_map : true" parameter in global map. But then, robot can not goes around dynamic obstacles . if I remove obstacle , robot can move goal point.
why dwa planner not doing a new plan for new obstacles ?
my params : https://github.com/husky/husky/tree/i...

Can you also post your planner_params.yaml file?