
fixed frame for rviz doesn't change
I wonder why i can't setup my own frame which i named my own frame by name "my_frame" in my
tracker_params2.yaml
command_rate: 0.5
tracking_rate: 10
base_controller_rate: 20
joint_controller_rate: 20
default_joint_speed: 2.0
max_drive_speed: 0.5
max_rotation_speed: 0.5
base_control_side: right
use_real_robot: False
# Use these values for a typical non-holonomic robot.
scale_drive_speed: 1.0
scale_rotation_speed: 1.0
reverse_rotation: False
holonomic: False
# Use the following scale factors for the Rovio.
#scale_drive_speed: 4.0
#scale_rotation_speed: 0.4
#reverse_rotation: True
#holonomic: True
#fixed_frame: openni_depth_frame
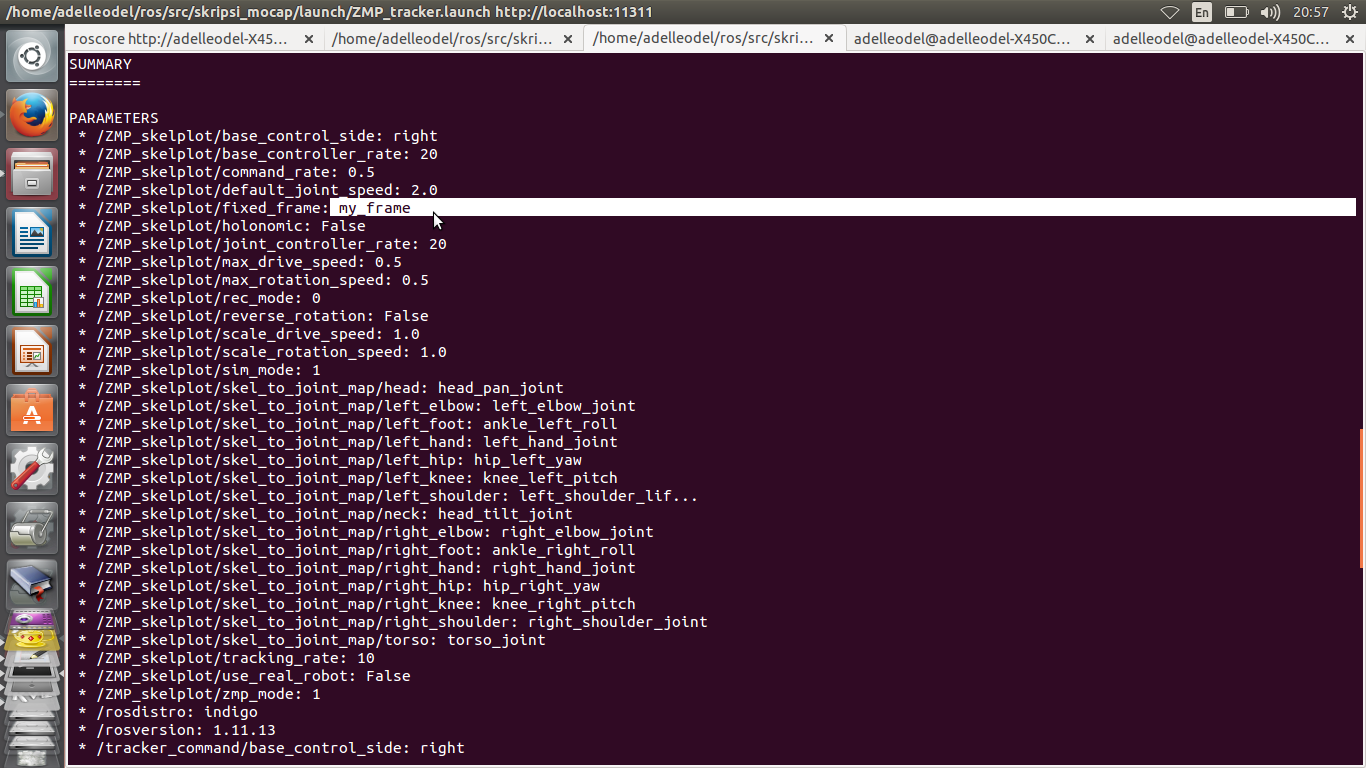
fixed_frame: my_frame
skel_to_joint_map: {
head: head_pan_joint,
neck: head_tilt_joint,
torso: torso_joint,
left_shoulder: left_shoulder_lift_joint,
left_elbow: left_elbow_joint,
left_hand: left_hand_joint,
right_shoulder: right_shoulder_joint,
right_elbow: right_elbow_joint,
right_hand: right_hand_joint,
left_hip: hip_left_yaw,
left_knee: knee_left_pitch,
left_foot: ankle_left_roll,
right_hip: hip_right_yaw,
right_knee: knee_right_pitch,
right_foot: ankle_right_roll
}
the ros itself has recognize "my_frame" such in this image:
but when i want to called it in rviz, it won't show anything like this:
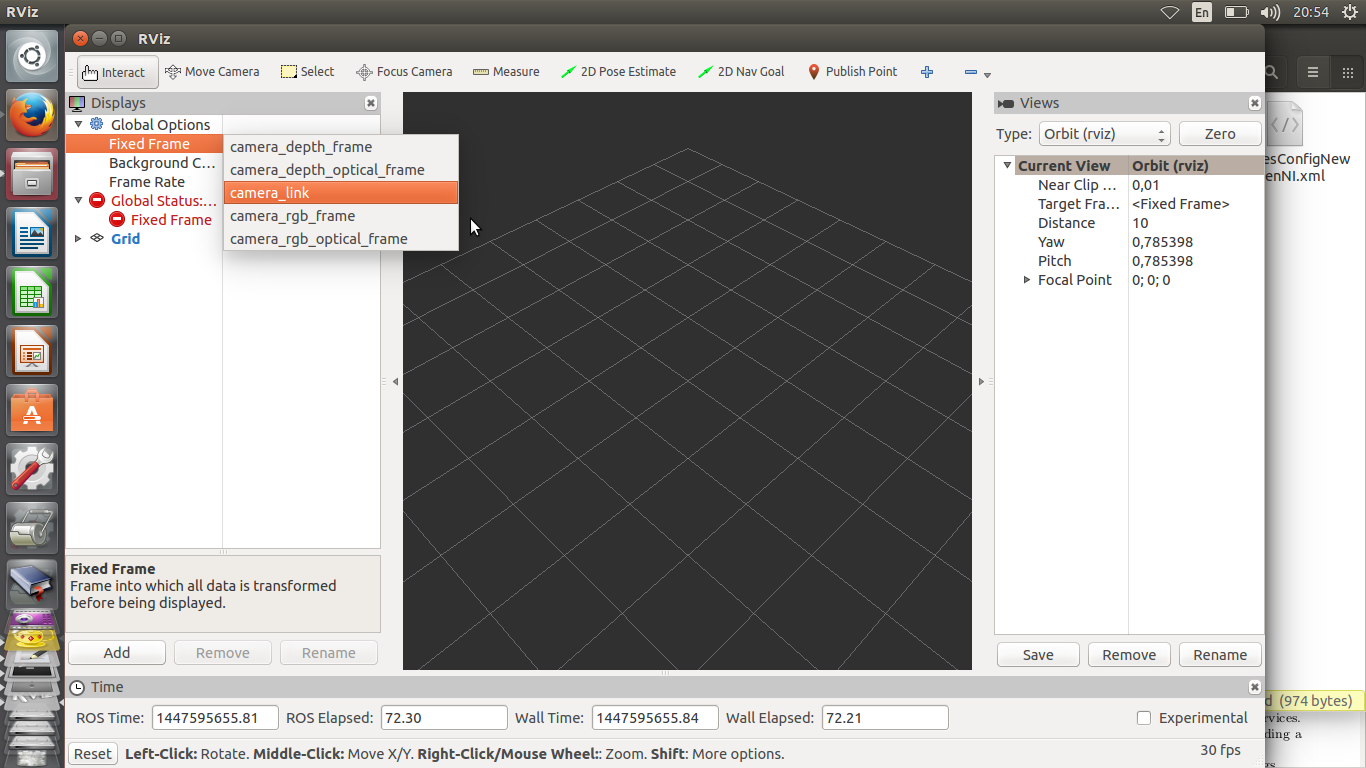
how to set my fixed frame to "my_frame" then?
add a comment

