
Error experience by 2Dcostmap [closed]
Hi guys. I am running a simulation where I have a laser scanner on the robot that serve as the input to the 2Dcostmap. As I will like to simulate a little turbulence on the robot , I added 2 revolute joints beneath the link of the sensor. So when the robot move, the sensor will experience some pitching and rolling.
I capped the joint limits of the revolute joint to be around 20 degrees.
After doing that, I run the simulation, expecting a small amount of distortion. However, the degree of distortion was larger than expected.
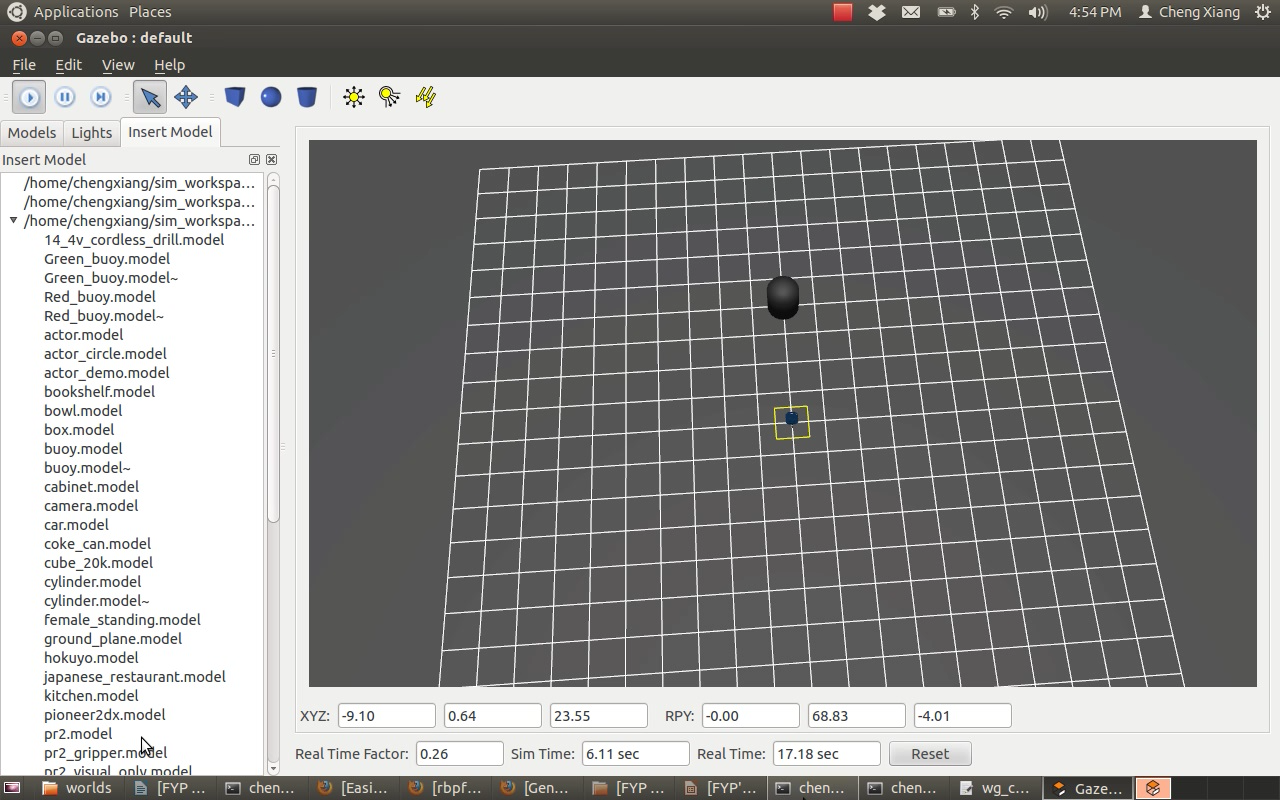
This is the simulation setup
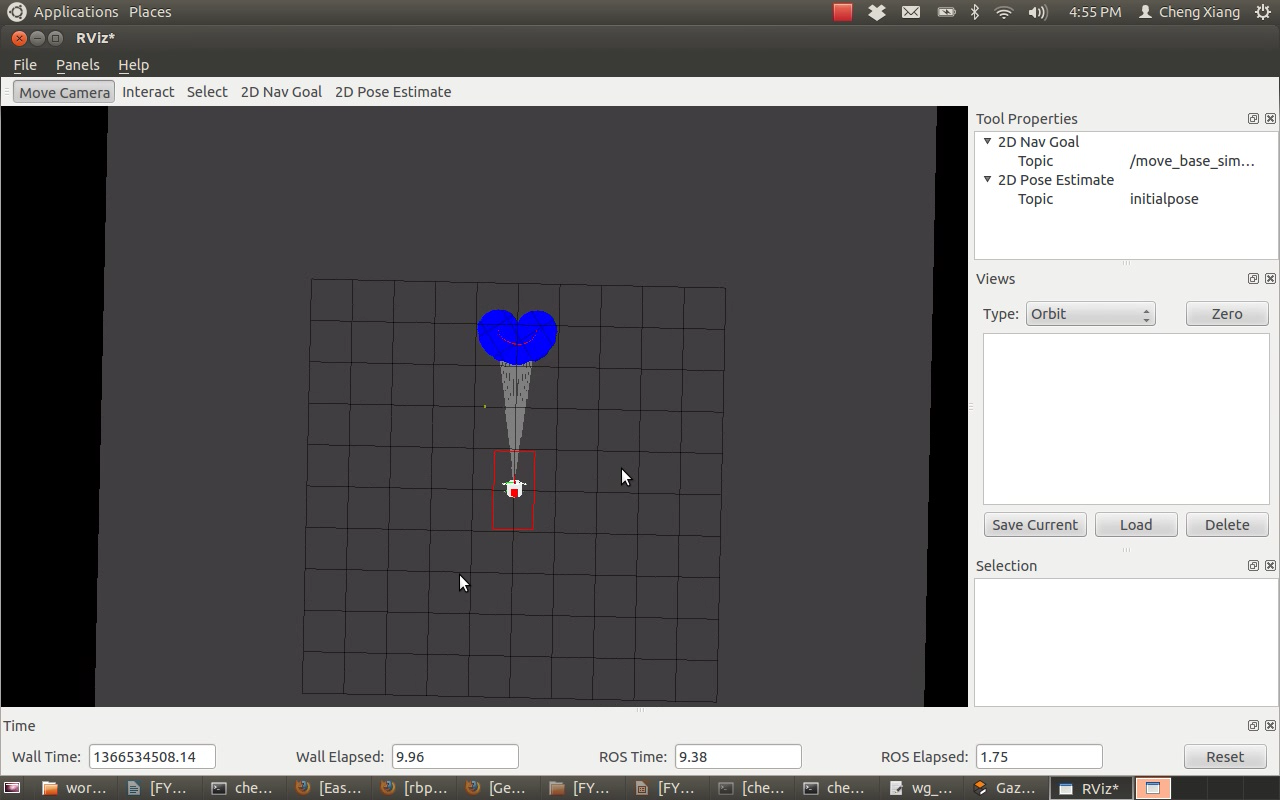
This is how the obstacle marking look like initially.
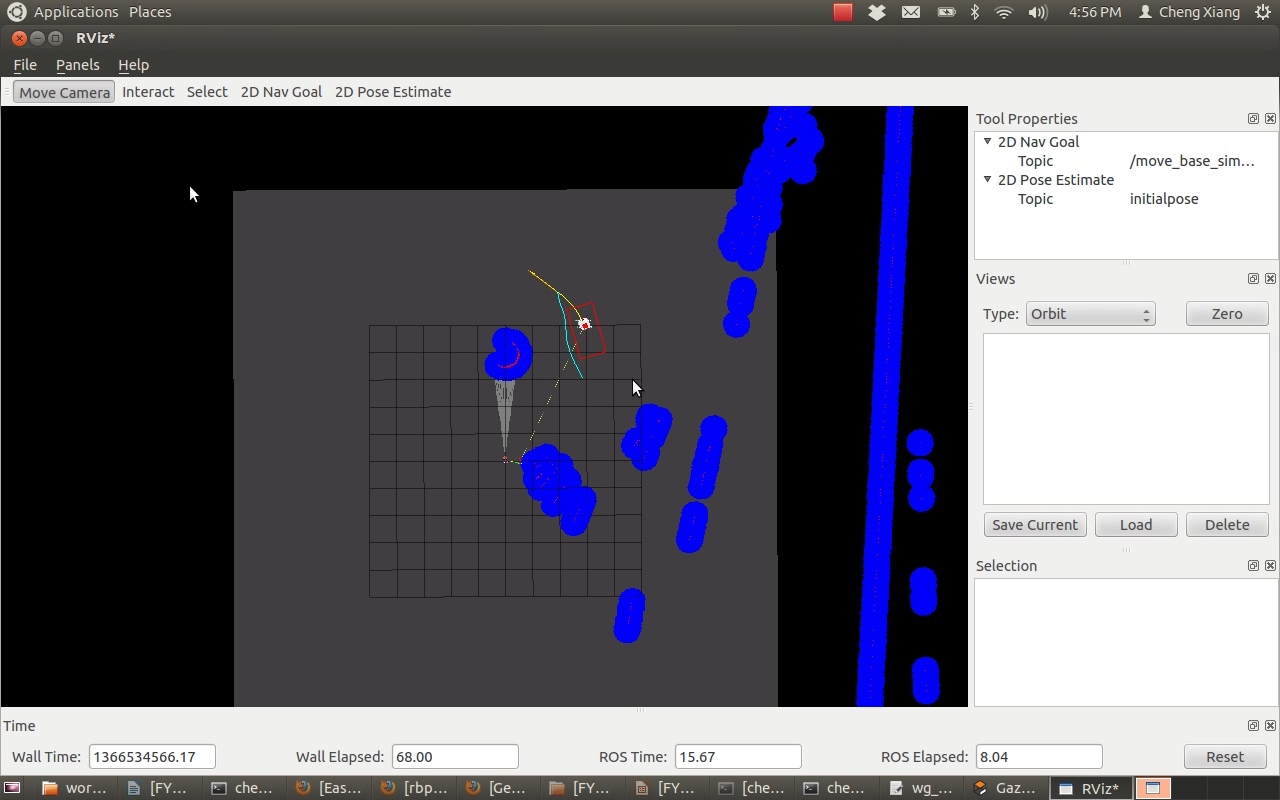
But after i move the robot around for a while, the obstacle markings became distorted.
I expected some distortion as I have simulate some pitching and rolling on the sensor. But I am wondering why does it result in such a bad reading? Or is there something amiss with my method? Remember that all i did was to add 2 revolute joints underneath the sensor link.
Thanks for any advise.
