
can image_proc/rectify nodelet process the image before image_proc/crop_decimate nodelet?
Hi guys, image_proc/rectify can't public any camera_info message, but image_proc/crop_decimate can do it. So, it seems that I can process a raw image before with crop_decimate and after with rectify, but not viceversa. Is it right?
Note: I tried to process rectifying before cropping with the following commands:
rosrun nodelet nodelet standalone image_proc/rectify /image_mono:=gscam/image_raw /camera_info:=gscam/camera_info
rosrun nolet nodelet standalone image_proc/crop_decimate _x_offset=1 _y_offset=1 _width=639 _height=439 /camera/image_raw:=image_rect /camera/camera_info:=gscam/camera_info
But this latest nodelet gives me back the following errors:
[ WARN] [1349944791.310821026]: [image_transport] Topics '/image_rect' and '/camera_info' do not appear to be synchronized. In the last 10s:
Image messages received: 288
CameraInfo messages received: 0
Synchronized pairs: 0
Node [/image_proc_crop_decimate]
Publications:
* /camera_out/camera_info [sensor_msgs/CameraInfo]
* /camera_out/image_raw/compressed [sensor_msgs/CompressedImage]
* /image_proc_crop_decimate/parameter_descriptions [dynamic_reconfigure/ConfigDescription]
* /camera_out/image_raw/compressed/parameter_updates [dynamic_reconfigure/Config]
* /image_proc_crop_decimate/parameter_updates [dynamic_reconfigure/Config]
* /rosout [rosgraph_msgs/Log]
* /camera_out/image_raw [sensor_msgs/Image]
* /camera_out/image_raw/theora/parameter_descriptions [dynamic_reconfigure/ConfigDescription]
* /camera_out/image_raw/theora/parameter_updates [dynamic_reconfigure/Config]
* /camera_out/image_raw/theora [theora_image_transport/Packet]
* /camera_out/image_raw/compressed/parameter_descriptions [dynamic_reconfigure/ConfigDescription]
Subscriptions:
* /image_rect [sensor_msgs/Image]
* /camera_info [unknown type]
Services:
* /camera_out/image_raw/theora/set_parameters
* /camera_out/image_raw/compressed/set_parameters
* /image_proc_crop_decimate/set_parameters
* /image_proc_crop_decimate/set_logger_level
* /image_proc_crop_decimate/get_loggers
Pid: 9120
Connections:
* topic: /rosout
* to: /rosout
* direction: outbound
* transport: TCPROS
* topic: /camera_out/image_raw
* to: /mbn_visualizer
* direction: outbound
* transport: TCPROS
* topic: /image_rect
* to: http://aldo-ubuntu:44836/
* direction: inbound
* transport: TCPROS
Note: this is my node connections:
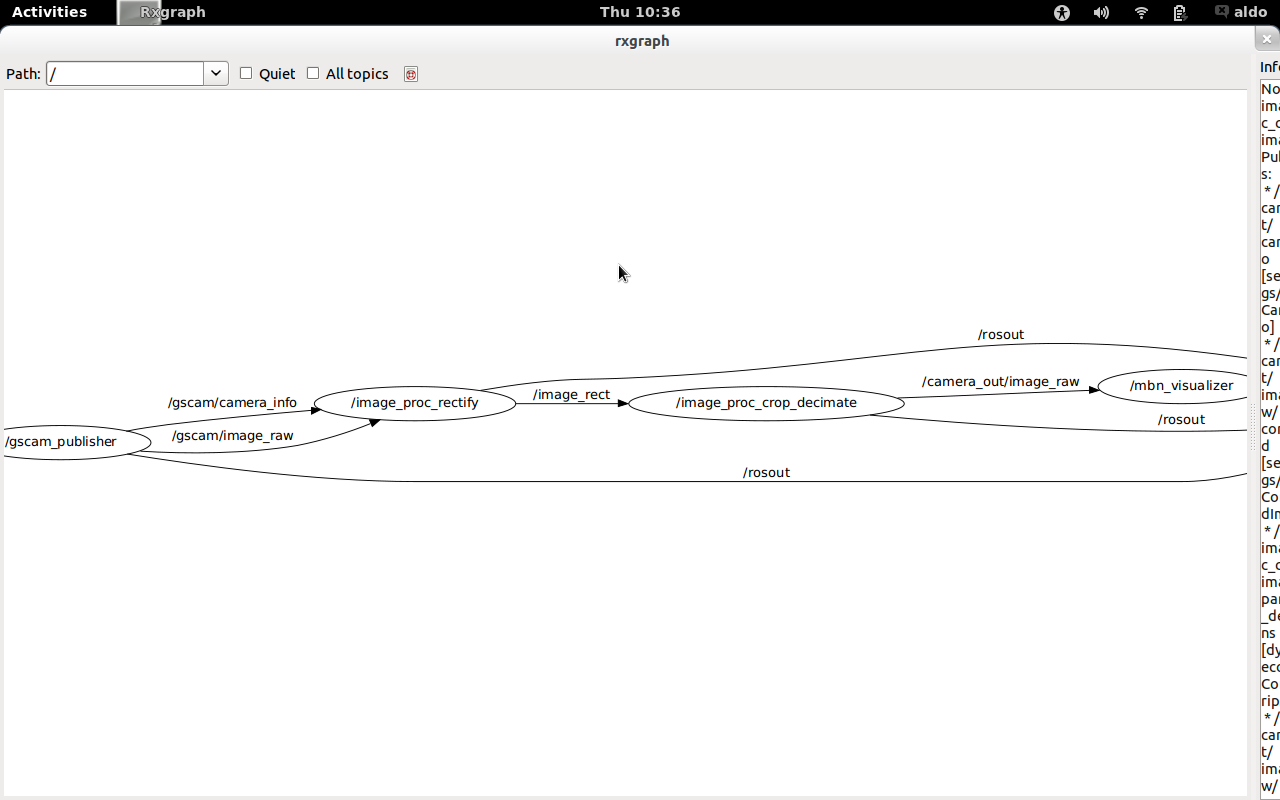
add a comment
