
How to set up image_proc/crop_decimate nodelet properly?
Sorry for this question but I'm newbie about ros nodelets. I'd like to use image_proc/crop_decimate to do a cropping on the rectified images. This is a rectified image:
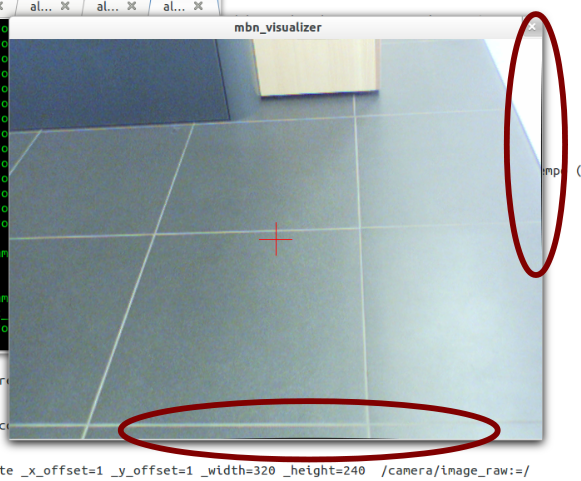
As you can see, It has a little black border on the right and on the bottom, so I 'd like to crop it. This is my rxgraph connections:
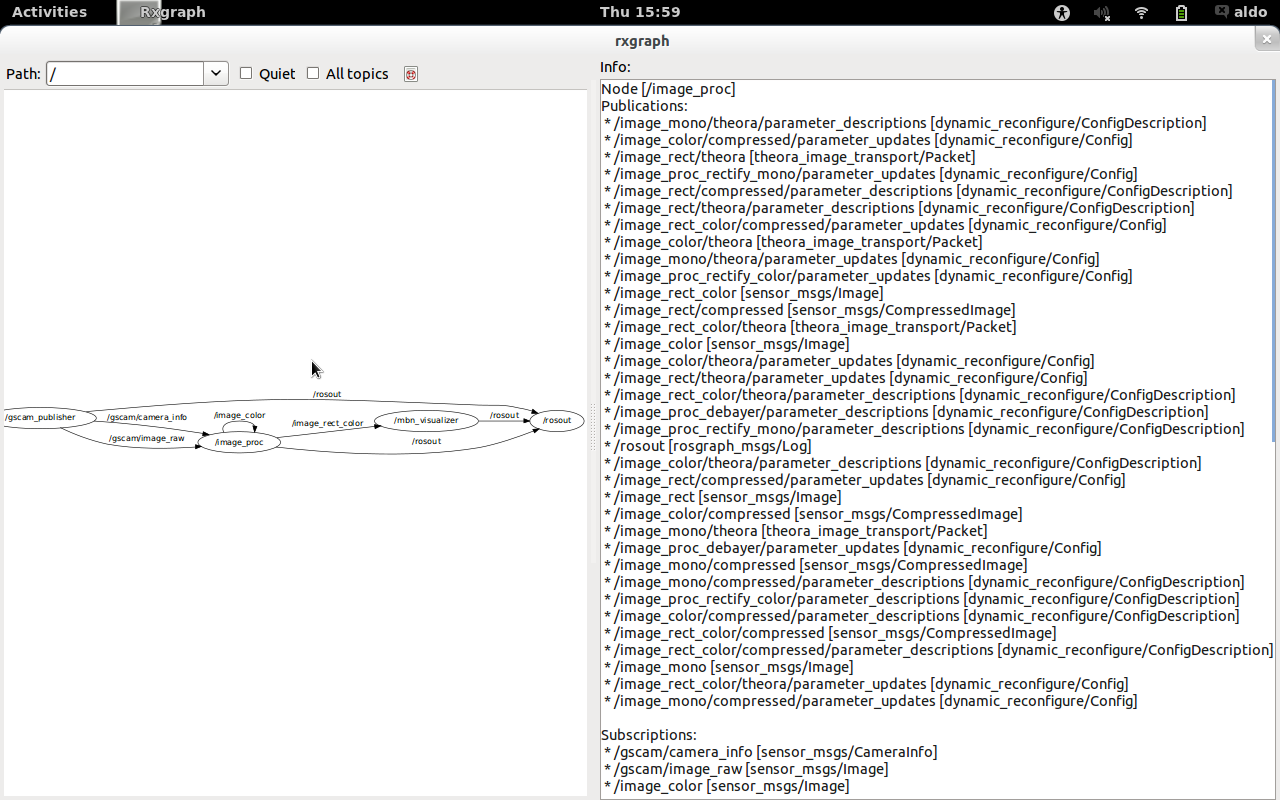
I've tried to set cropping with the following command, but It has no effect:
rosrun nodelet nodelet standalone image_proc/crop_decimate _x_offset=1 _y_offset=1 _width=639 _height=439 /camera:=/image_rect_color
How to set image_proc/crop_decimate properly?
this is my rostopic list:
aldo@aldo-ubuntu:/opt/ros/electric/stacks/image_pipeline/image_proc$ rostopic list
/gscam/camera_info
/gscam/image_raw
/gscam/image_raw/compressed
/gscam/image_raw/compressed/parameter_descriptions
/gscam/image_raw/compressed/parameter_updates
/gscam/image_raw/theora
/gscam/image_raw/theora/parameter_descriptions
/gscam/image_raw/theora/parameter_updates
/image_color
/image_color/compressed
/image_color/compressed/parameter_descriptions
/image_color/compressed/parameter_updates
/image_color/theora
/image_color/theora/parameter_descriptions
/image_color/theora/parameter_updates
/image_mono
/image_mono/compressed
/image_mono/compressed/parameter_descriptions
/image_mono/compressed/parameter_updates
/image_mono/theora
/image_mono/theora/parameter_descriptions
/image_mono/theora/parameter_updates
/image_proc_debayer/parameter_descriptions
/image_proc_debayer/parameter_updates
/image_proc_rectify_color/parameter_descriptions
/image_proc_rectify_color/parameter_updates
/image_proc_rectify_mono/parameter_descriptions
/image_proc_rectify_mono/parameter_updates
/image_rect
/image_rect/compressed
/image_rect/compressed/parameter_descriptions
/image_rect/compressed/parameter_updates
/image_rect/theora
/image_rect/theora/parameter_descriptions
/image_rect/theora/parameter_updates
/image_rect_color
/image_rect_color/compressed
/image_rect_color/compressed/parameter_descriptions
/image_rect_color/compressed/parameter_updates
/image_rect_color/theora
/image_rect_color/theora/parameter_descriptions
/image_rect_color/theora/parameter_updates
/rosout
/rosout_agg
add a comment

