
Odometry arrows displayed in RViz are too small
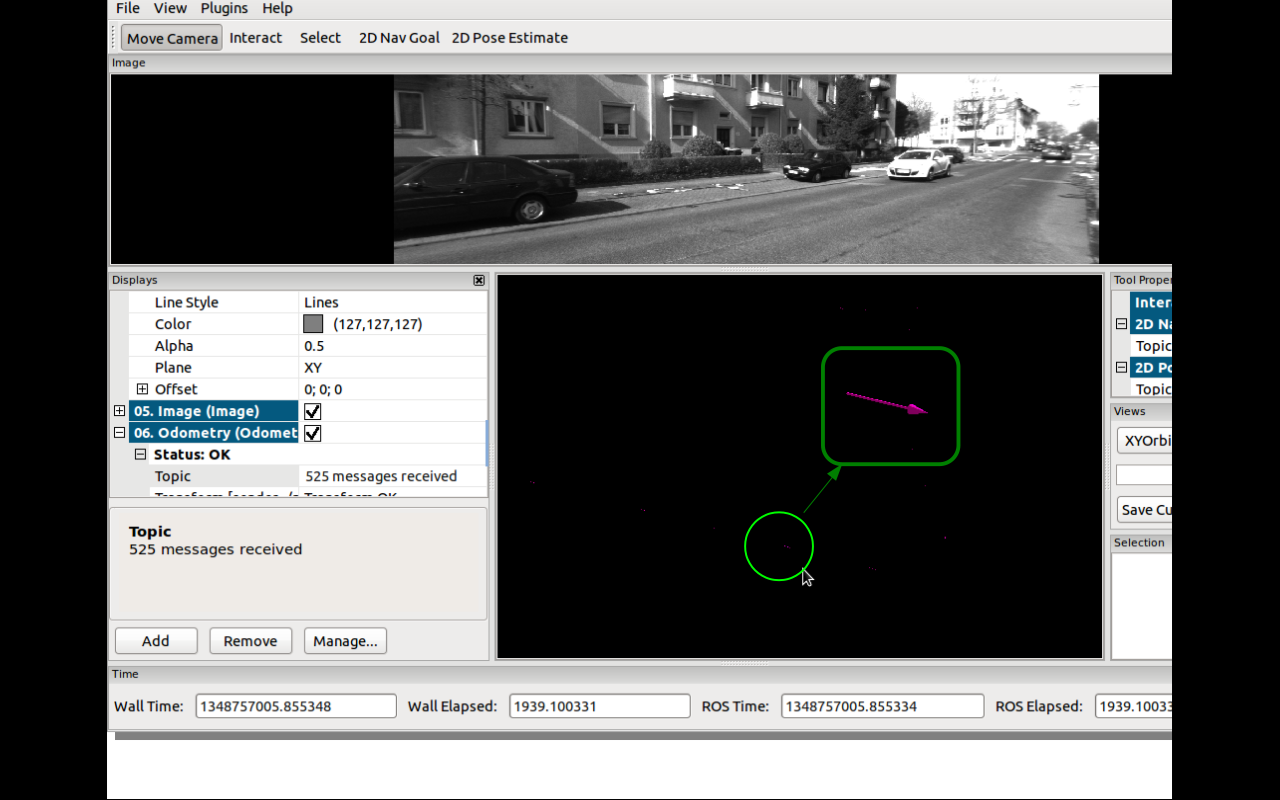
Hi everybody, as you can see in the following image, odometry arrows are too small (in the circle you can see a displayed arrows, in the rectangle I painted an enlarged arrow):
I would like to grow up arrow size but I don't know how do it because Odometry type seems to not have a option that allow it: http://www.ros.org/wiki/rviz/DisplayTypes/Odometry
add a comment
